Blind Landing Experimental Unit
[2] Pilots in the early days of aviation relied on dead reckoning to find out where they were flying, which proved difficult or impossible at night or in bad weather.
Early suggestions at addressing the problem ranged from using primitive radio signals[4] to placing emergency landing strips periodically near major highways.
Diamond-Dunmore appears to have seen no active uses, but the Lorenz system was deployed at major airports in Germany, the UK and other European locations and their related foreign fields.
Before the formation of BLEU, an automatic landing was made at the Telecommunications Flying Unit (TFU) of the TRE at RAF Defford in a Boeing 247D aircraft, DZ203, early in 1945, using the American SCS 51 radio guidance system.
There was no flare-out; the low approach speed and shallow glide angle meant that the aircraft could be allowed to fly straight onto the ground.
[12] The terms of reference were that the unit "will operate as a satellite of the RAE and will be responsible for the development on blind approach and landing of RAF, Naval and Civil aircraft".
While the system worked and was relatively simple to implement using 1940s technology, it was not accurate enough to provide guidance during landing, with accuracy on the order of a few hundred feet.
[16] For vertical guidance, a new FM radio altimeter that BLEU developed was capable of resolving height differences to 2 feet at low altitude.
[14][18] In collaboration with Smiths Industries Ltd., BLEU also developed coupling units to derive the commands to the autopilot from the guidance signals, and auto-throttle.
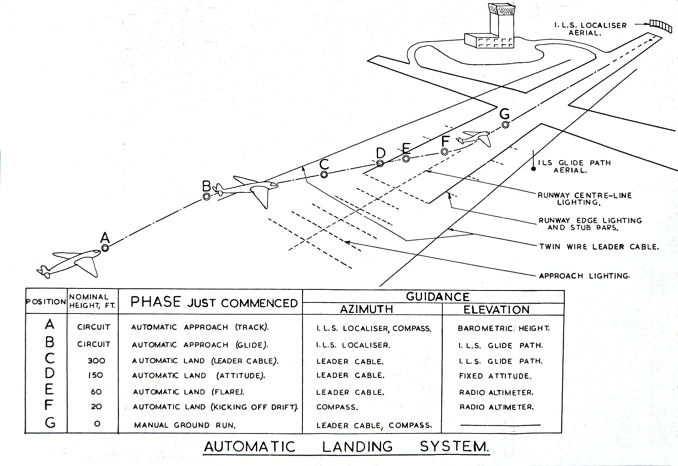
The following diagram, from J S Shayler's 1958 memorandum, shows how the different components of the system, and guidance signals, were used during the consecutive phases of an automatic landing.
During the early 1950s, as a preliminary to the development of the full Autoland system, automatic approach trials were carried out on Valetta, Meteor and Canberra aircraft.
The Canberra, VN799, was acquired in 1953 but was a write-off following a crash landing in August that year due to a double engine failure, fortunately without serious injury to the crew.
17 March saw "strong tailwind, 20 – 25 kt., pronounced float" and on 20 June, after adjustments during a further 20 flights: "not bad – about 0.7 g nicely on main wheels – kicking off drift OK".
[31] The V-bomber project to install and develop Autoland on Vulcan XA899, originally classified as Secret, ran in parallel with the Canberra and Varsity work.
Some improvement resulted from a narrow beam localizer aerial system developed by BLEU during the early 1950s[34] and by 1958 automatic landings had been made using only ILS localiser for azimuth guidance.
After that and further tests on return to Atlantic City, the FAA were convinced and thereafter strongly supported a fully automatic solution to the all-weather problem which later was adopted internationally.
[38] In 1961, the UK Air Registration Board (ARB) of the CAA issued a working document BCAR 367 "Airworthiness Requirements for Autoflare and Automatic Landing" which formed the basis for the definitions for weather visibility categories adopted by ICAO in 1965.
"Nuisance disconnects" were an early problem with that system, eventually solved by the industry, using torque switches with a controlled degree of lost motion.
[42] BLEU (renamed the Operational Systems Division of RAE in 1974) continued to play a leading role in the development of aircraft guidance systems, using a variety of aircraft including DH Comet, BAC 1–11, HS 748 (to replace the Varsities, which had been the main "work horses" for BLEU experiments for more than a decade) and VC-10 until the closure of RAE Bedford in 1994.
[43] Flight Lieutenant Noel Adams made the first automatic landing on 3 July 1950 in BLEU's test plane, a Vickers Varsity.
In his 1959 paper[45] John Charnley, then Superintendent of the BLEU, concluded a discussion of statistical results by saying that "It is fair to claim, therefore, that not only will the automatic system land the aircraft when the weather prevents the human pilot, it also performs the operation much more precisely".