Cartesian tensor
where the coordinates of the vector with respect to the Cartesian basis are denoted ax, ay, az.
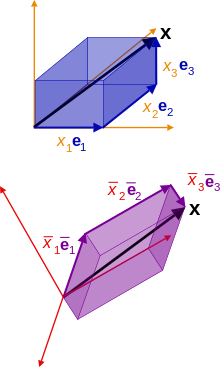
The Cartesian labels are replaced by tensor indices in the basis vectors ex ↦ e1, ey ↦ e2, ez ↦ e3 and coordinates ax ↦ a1, ay ↦ a2, az ↦ a3.
An advantage of the index notation over coordinate-specific notations is the independence of the dimension of the underlying vector space, i.e. the same expression on the right hand side takes the same form in higher dimensions (see below).
See matrix multiplication for the notational correspondence between matrices and the dot and tensor products.
{\displaystyle {\begin{aligned}\mathbf {T} =\quad &T_{\text{xx}}\mathbf {e} _{\text{xx}}+T_{\text{xy}}\mathbf {e} _{\text{xy}}+T_{\text{xz}}\mathbf {e} _{\text{xz}}\\[4pt]{}+{}&T_{\text{yx}}\mathbf {e} _{\text{yx}}+T_{\text{yy}}\mathbf {e} _{\text{yy}}+T_{\text{yz}}\mathbf {e} _{\text{yz}}\\[4pt]{}+{}&T_{\text{zx}}\mathbf {e} _{\text{zx}}+T_{\text{zy}}\mathbf {e} _{\text{zy}}+T_{\text{zz}}\mathbf {e} _{\text{zz}}\end{aligned}}}
By "linear", if u = ρr + σs for two scalars ρ and σ and vectors r and s, then in function and index notations:
One can associate a tensor index or coordinate label with a basis vector direction.
There are considerable algebraic simplifications, the matrix transpose is the inverse from the definition of an orthogonal transformation:
One can determine the actual raised and lowered indices by considering which quantities are covectors or contravectors, and the relevant transformation rules.
Replacing Cartesian labels by index notation as shown above, these results can be summarized by
which is intuitive, since the dot product of two vectors is a single scalar independent of any coordinates.
These permutation relations and their corresponding values are important, and there is an object coinciding with this property: the Levi-Civita symbol, denoted by ε.
Contrary to its appearance, the Levi-Civita symbol is not a tensor, but a pseudotensor, the components transform according to:
Other identities can be formed from the δ tensor and ε pseudotensor, a notable and very useful identity is one that converts two Levi-Civita symbols adjacently contracted over two indices into an antisymmetrized combination of Kronecker deltas:
The index forms of the dot and cross products, together with this identity, greatly facilitate the manipulation and derivation of other identities in vector calculus and algebra, which in turn are used extensively in physics and engineering.
For instance, it is clear the dot and cross products are distributive over vector addition:
without resort to any geometric constructions – the derivation in each case is a quick line of algebra.
and because cyclic permutations of indices in the ε symbol does not change its value, cyclically permuting indices in εkℓm to obtain εℓmk allows us to use the above δ-ε identity to convert the ε symbols into δ tensors:
Similarly, via index notation or even just cyclically relabelling a, b, and c in the previous result and taking the negative:
Let a = aiei and b = biei be two vectors, so that they transform according to aj = aiLij, bj = biLij.
These fields are defined from the Lorentz force for a particle of electric charge q traveling at velocity v:
The angular momentum of a classical pointlike particle orbiting about an axis, defined by J = x × p, is another example of a pseudovector, with corresponding antisymmetric tensor:
The index notation for the dot and cross products carries over to the differential operators of vector calculus.
Note the interchange of the components of the gradient and vector field yields a different differential operator
In each case, the order of the gradient and vector field components should not be interchanged as this would result in a different differential operator:
Finally, the Laplacian operator is defined in two ways, the divergence of the gradient of a scalar field Φ:
In physics and engineering, the gradient, divergence, curl, and Laplacian operator arise inevitably in fluid mechanics, Newtonian gravitation, electromagnetism, heat conduction, and even quantum mechanics.
Let T = T(r, t) denote a second order tensor field, again dependent on the position vector r and time t. For instance, the gradient of a vector field in two equivalent notations ("dyadic" and "tensor", respectively) is:
This arises in continuum mechanics in Cauchy's laws of motion – the divergence of the Cauchy stress tensor σ is a vector field, related to body forces acting on the fluid.
A Cartesian basis does not exist unless the vector space has a positive-definite metric, and thus cannot be used in relativistic contexts.