Dynkin diagram
In the mathematical field of Lie theory, a Dynkin diagram, named for Eugene Dynkin, is a type of graph with some edges doubled or tripled (drawn as a double or triple line).
Dynkin diagrams arise in the classification of semisimple Lie algebras over algebraically closed fields, in the classification of Weyl groups and other finite reflection groups, and in other contexts.
Various properties of the Dynkin diagram (such as whether it contains multiple edges, or its symmetries) correspond to important features of the associated Lie algebra.
One classifies such Lie algebras via their root system, which can be represented by a Dynkin diagram.
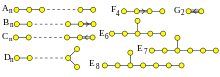
The central classification is that a simple Lie algebra has a root system, to which is associated an (oriented) Dynkin diagram; all three of these may be referred to as Bn, for instance.
[citation needed] Lastly, sometimes associated objects are referred to by the same notation, though this cannot always be done regularly.
The simply laced Dynkin diagrams, those with no multiple edges (A, D, E) classify many further mathematical objects; see discussion at ADE classification.
may refer to: Consider a root system, assumed to be reduced and integral (or "crystallographic").
In many applications, this root system will arise from a semisimple Lie algebra.
Since these two roots are at angle of 120 degrees (with a length ratio of 1), the Dynkin diagram consists of two vertices connected by a single edge: .
The corresponding mathematical objects classified by the diagrams are: The blank in the upper right, corresponding to directed graphs with underlying undirected graph any Coxeter diagram (of a finite group), can be defined formally, but is little-discussed, and does not appear to admit a simple interpretation in terms of mathematical objects of interest.
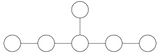
For D4, the fundamental representation is isomorphic to the two spin representations, and the resulting symmetric group on three letter (S3, or alternatively the dihedral group of order 6, Dih3) corresponds both to automorphisms of the Lie algebra and automorphisms of the diagram.
The automorphism group of E6 corresponds to reversing the diagram, and can be expressed using Jordan algebras.
This also yields additional exotic Lie groups 2E6 and 3D4, the latter only defined over fields with an order 3 automorphism.
The additional diagram automorphisms in positive characteristic yield the Suzuki–Ree groups, 2B2, 2F4, and 2G2.
At the level of Lie algebras, this corresponds to taking the invariant subalgebra under the outer automorphism group, and the process can be defined purely with reference to root systems, without using diagrams.
[10] The one condition on the automorphism for folding to be possible is that distinct nodes of the graph in the same orbit (under the automorphism) must not be connected by an edge; at the level of root systems, roots in the same orbit must be orthogonal.
Some inclusions of root systems can be expressed as one diagram being an induced subgraph of another, meaning "a subset of the nodes, with all edges between them".
Dynkin diagrams classify complex semisimple Lie algebras.
Real semisimple Lie algebras can be classified as real forms of complex semisimple Lie algebras, and these are classified by Satake diagrams, which are obtained from the Dynkin diagram by labeling some vertices black (filled), and connecting some other vertices in pairs by arrows, according to certain rules.
[citation needed] Undirected graphs had been used earlier by Coxeter (1934) to classify reflection groups, where the nodes corresponded to simple reflections; the graphs were then used (with length information) by Witt (1941) in reference to root systems, with the nodes corresponding to simple roots, as they are used today.
Dynkin diagrams have been drawn in a number of ways;[15] the convention followed here is common, with 180° angles on nodes of valence 2, 120° angles on the valence 3 node of Dn, and 90°/90°/180° angles on the valence 3 node of En, with multiplicity indicated by 1, 2, or 3 parallel edges, and root length indicated by drawing an arrow on the edge for orientation.
Moreover, multiple sources refer to hyberbolic Coxeter groups, but there are several non-equivalent definitions for this term.
In the discussion below, hyperbolic Coxeter groups are a special case of Lorentzian, satisfying an extra condition.
For rank 2, all negative determinant Cartan matrices correspond to hyperbolic Coxeter group.
Note1: For hyperbolic groups, (a12⋅a21>4), the multiedge style is abandoned in favor of an explicit labeling (a21, a12) on the edge.
are most common, and are called extended Dynkin diagrams and denoted with a tilde, and also sometimes marked with a + superscript.
Other directed-graph variations are given with a superscript value (2) or (3), representing foldings of higher order groups.
[18] The set of compact and noncompact hyperbolic Dynkin graphs has been enumerated.
Other extended series not shown can be defined from An, Bn, Cn, and Dn, as different series for each n. The determinant of the associated Cartan matrix determine where the series changes from finite (positive) to affine (zero) to a noncompact hyperbolic group (negative), and ending as a Lorentz group that can be defined with the use of one time-like dimension, and is used in M theory.