Moment of inertia
For an extended rigid body, the moment of inertia is just the sum of all the small pieces of mass multiplied by the square of their distances from the axis in rotation.
In 1673, Christiaan Huygens introduced this parameter in his study of the oscillation of a body hanging from a pivot, known as a compound pendulum.
Comparison of this natural frequency to that of a simple pendulum consisting of a single point of mass provides a mathematical formulation for moment of inertia of an extended body.
[4][5] The moment of inertia also appears in momentum, kinetic energy, and in Newton's laws of motion for a rigid body as a physical parameter that combines its shape and mass.
The moment of inertia of an airplane about its longitudinal, horizontal and vertical axes determine how steering forces on the control surfaces of its wings, elevators and rudder(s) affect the plane's motions in roll, pitch and yaw.
Thus, the moment of inertia of the pendulum depends on both the mass m of a body and its geometry, or shape, as defined by the distance r to the axis of rotation.
This simple formula generalizes to define moment of inertia for an arbitrarily shaped body as the sum of all the elemental point masses dm each multiplied by the square of its perpendicular distance r to an axis k. An arbitrary object's moment of inertia thus depends on the spatial distribution of its mass.
A compound pendulum is a body formed from an assembly of particles of continuous shape that rotates rigidly around a pivot.
so that it swings freely in a plane perpendicular to the direction of the desired moment of inertia, then measure its natural frequency or period of oscillation (
Notice that the distance to the center of oscillation of the seconds pendulum must be adjusted to accommodate different values for the local acceleration of gravity.
A trifilar pendulum is a platform supported by three wires designed to oscillate in torsion around its vertical centroidal axis.
To see how moment of inertia arises in the study of the movement of an extended body, it is convenient to consider a rigid assembly of point masses.
Thus, moment of inertia is a physical property that combines the mass and distribution of the particles around the rotation axis.
The moment of inertia of a continuous body rotating about a specified axis is calculated in the same way, except with infinitely many point particles.
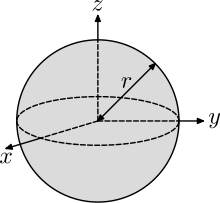
As one more example, consider the moment of inertia of a solid sphere of constant density about an axis through its center of mass.
This is determined by summing the moments of inertia of the thin discs that can form the sphere whose centers are along the axis chosen for consideration.
The definition of the polar moment of inertia can be obtained by considering momentum, kinetic energy and Newton's laws for the planar movement of a rigid system of particles.
, are assembled into a rigid body, then the momentum of the system can be written in terms of positions relative to a reference point
Planar movement is often presented as projected onto this ground plane so that the axis of rotation appears as a point.
But in the case of moment of inertia, the combination of mass and geometry benefits from the geometric properties of the cross product.
about an axis perpendicular to the movement of the rigid system and through the center of mass is known as the polar moment of inertia.
The scalar moments of inertia appear as elements in a matrix when a system of particles is assembled into a rigid body that moves in three-dimensional space.
This inertia matrix appears in the calculation of the angular momentum, kinetic energy and resultant torque of the rigid system of particles.
is the symmetric inertia matrix of the rigid system of particles measured relative to the center of mass
The inertia matrix appears in the application of Newton's second law to a rigid assembly of particles.
is either at rest or moving at a constant velocity but not accelerated, or the origin of the fixed (world) coordinate reference system is placed at the center of mass
There are some CAD and CAE applications such as SolidWorks, Unigraphics NX/Siemens NX and MSC Adams that use an alternate convention for the products of inertia.
If a rigid body has at least two symmetry axes that are not parallel or perpendicular to each other, it is a spherical top, for example, a cube or any other Platonic solid.
The motion of vehicles is often described in terms of yaw, pitch, and roll which usually correspond approximately to rotations about the three principal axes.
The moment of inertia matrix in body-frame coordinates is a quadratic form that defines a surface in the body called Poinsot's ellipsoid.


- spherical shell,
- solid sphere,
- cylindrical ring, and
- solid cylinder.