Underwater searches
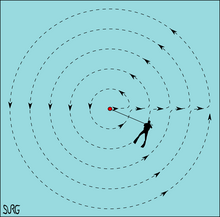
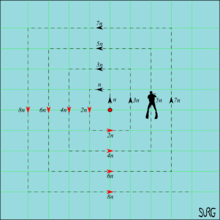
An underwater circular search is a procedure conducted by a diver moving around a fixed reference point, usually by swimming, at a series of distances (radii).
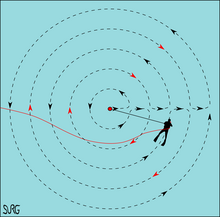
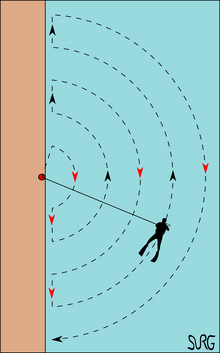
Divers on surface supply may change direction at the end of each arc even when using a full 360° pattern to avoid twisting the umbilical.
It is effective where the position of the target is known with reasonable accuracy, where the bottom terrain does not have major snags, and where the depth variation during each arc is acceptable.
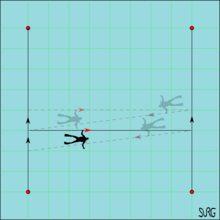
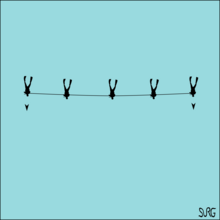
When they reach the end of the line in the water, the surface team advance the jackstay by an appropriate amount by lifting it, moving it parallel to the original position and laying it down again, at which stage the divers make another sweep.
While following recommended best practice makes it highly unlikely that a diver will lose the line, it can and does happen, and there are procedures which will usually work to find it again.
The gap between the parallel legs is chosen for easy counting and sufficient overlap to provide a good chance of spotting the target.
The separation between lines is chosen to allow sufficient overlap to ensure a high probability of the search target being seen if the diver passes by.
The swim line method can also be applied to a circular pattern, but this is inefficient and usually badly co-ordinated as the direction is constantly changing.
This has a relatively limited scope, but can work in some cases, particularly when the surface team has a real time sonar picture of the target and the diver in bad visibility.
They steer and control their depth by using a tow board, which may be equipped with a safety quick disconnect mechanism and drop-floats to mark targets.
1 Underwater search is a basic aspect of deep water salvage operations, as before an object can be recovered, it must first be found, inspected and identified, and the position recorded so that it can be returned to when necessary.
It is usual for single beam echo sounders to be permanently installed on a ship with the transducer arrays mounted through the hull.[9]: Ch.
Sonar searches generally rely on expert human interpretation of a computer generated image of the bottom topography to detect and identify a target.
Side-scan sonar uses acoustic transducers towed underwater to produce a plan view image of the seafloor showing details of the topography and artifacts to the sides of the track.
They have a relatively limited detection range, as the target is not usually strongly magnetised, and can also pick up volcanic rock if present in large amounts.[9]: Ch.
By correlating positive signals from both the side-scan sonar and a magnetometer sensor towed in tandem, the probability of detection of the object can be significantly improved.
A laser-imaging system utilizes a blue/green laser as the illumination source to minimize attenuation and backscattering problems and can image targets as far as 50 meters away.
2 The ship must reverse heading and steady its course with the towfish aligned and at the correct depth at the end of each line and before re-entering the search area.
The "Z" search makes use of the linear nature of pipelines and cables by ensuring that the towed sensor will cross the object several times at a reasonable angle for detection.
The lane spacing must be less than the swath width of the sensor to allow for enough range overlap to assure complete coverage of the search area.
As lane spacing is decreased, the coverage and search quality increases because a greater percentage of seafloor is examined in two separate sensor passes.
It provides a margin of safety to mitigate ship track and sensor tow path variations and compensates for the inherent loss in the sonar signal quality at the outer ranges.
[12] Trailing the hydrophones behind the vessel, on a cable that can be kilometers long, keeps the array's sensors away from the ship's own noise sources, greatly improving its signal-to-noise ratio, and hence the effectiveness of detecting and tracking faint contacts, such as quiet, low noise-emitting submarine threats, or seismic signals.
[14] Sonar produces a picture of the bottom by plotting the image derived from the time between emission of a sound signal from the transducer and the reception of an echo from a given direction.
Resolution decreases with distance from the transducer, but at moderate range the form of a human body can be recognisable, making this a useful method for search and recovery operations.
A transducer array mounted in a streamlined housing (known as the "fish" or "towfish") can be towed behind a vessel at a desired depth to provide suitable resolution.
The signal is correlated to position input, usually from GPS, to indicate local magnetic anomalies which may be worth further investigation by diver or ROV.
An ROV is limited to operating in small areas because of the restriction of the umbilical on maneuverability and range, but it can be very effective in searching a debris field for specific items.
AUSS could do broad area searches and immediate target evaluation interchangeably, and could provide near-real-time high-resolution sonar data at speeds up to five knots.
[citation needed] Cadaver dogs are used by law enforcement and public safety agencies to detect missing bodies underwater.