Inverse trigonometric functions
Inverse trigonometric functions are widely used in engineering, navigation, physics, and geometry.
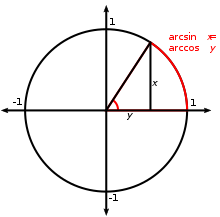
The most common convention is to name inverse trigonometric functions using an arc- prefix: arcsin(x), arccos(x), arctan(x), etc.
[5] In computer programming languages, the inverse trigonometric functions are often called by the abbreviated forms asin, acos, atan.
[6] The notations sin−1(x), cos−1(x), tan−1(x), etc., as introduced by John Herschel in 1813,[7][8] are often used as well in English-language sources,[1] much more than the also established sin[−1](x), cos[−1](x), tan[−1](x) – conventions consistent with the notation of an inverse function, that is useful (for example) to define the multivalued version of each inverse trigonometric function:
However, this might appear to conflict logically with the common semantics for expressions such as sin2(x) (although only sin2 x, without parentheses, is the really common use), which refer to numeric power rather than function composition, and therefore may result in confusion between notation for the reciprocal (multiplicative inverse) and inverse function.
[9] The confusion is somewhat mitigated by the fact that each of the reciprocal trigonometric functions has its own name — for example, (cos(x))−1 = sec(x).
[1][10] Another precarious convention used by a small number of authors is to use an uppercase first letter, along with a “−1” superscript: Sin−1(x), Cos−1(x), Tan−1(x), etc.
[11] Although it is intended to avoid confusion with the reciprocal, which should be represented by sin−1(x), cos−1(x), etc., or, better, by sin−1 x, cos−1 x, etc., it in turn creates yet another major source of ambiguity, especially since many popular high-level programming languages (e.g. Mathematica and MAGMA) use those very same capitalised representations for the standard trig functions, whereas others (Python, SymPy, NumPy, Matlab, MAPLE, etc.)
Hence, since 2009, the ISO 80000-2 standard has specified solely the "arc" prefix for the inverse functions.
Note: Some authors [citation needed] define the range of arcsecant to be (
If x is allowed to be a complex number, then the range of y applies only to its real part.
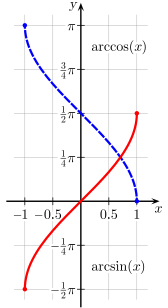
The table below displays names and domains of the inverse trigonometric functions along with the range of their usual principal values in radians.
Each of the trigonometric functions is periodic in the real part of its argument, running through all its values twice in each interval of
is positive, and thus the result has to be corrected through the use of absolute values and the signum (sgn) operation.
Useful identities if one only has a fragment of a sine table: Whenever the square root of a complex number is used here, we choose the root with the positive real part (or positive imaginary part if the square was negative real).
[15] Two alternatives to the power series for arctangent are these generalized continued fractions: The second of these is valid in the cut complex plane.
The first was developed by Leonhard Euler; the second by Carl Friedrich Gauss utilizing the Gaussian hypergeometric series.
The following identities for principal values of the functions hold everywhere that they are defined, even on their branch cuts.
is complex-valued, we have to use the final equation so that the real part of the result isn't excluded.
Since the length of the hypotenuse doesn't change the angle, ignoring the real part of
In the final equation, we see that the angle of the triangle in the complex plane can be found by inputting the lengths of each side.
, we obtain a formula for one of the inverse trig functions, for a total of six equations.
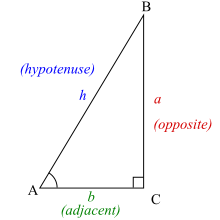
Because the inverse trig functions require only one input, we must put the final side of the triangle in terms of the other two using the Pythagorean Theorem relation The table below shows the values of a, b, and c for each of the inverse trig functions and the equivalent expressions for
The particular form of the simplified expression can cause the output to differ from the usual principal branch of each of the inverse trig functions.
Recalling the right-triangle definitions of sine and cosine, it follows that Often, the hypotenuse is unknown and would need to be calculated before using arcsine or arccosine using the Pythagorean Theorem:
It was first introduced in many computer programming languages, but it is now also common in other fields of science and engineering.
In terms of the standard arctan function, that is with range of (−π/2, π/2), it can be expressed as follows: It also equals the principal value of the argument of the complex number x + iy.
This limited version of the function above may also be defined using the tangent half-angle formulae as follows: provided that either x > 0 or y ≠ 0.
The above argument order (y, x) seems to be the most common, and in particular is used in ISO standards such as the C programming language, but a few authors may use the opposite convention (x, y) so some caution is warranted.
Computer applications thus need to consider the stability of inputs to these functions and the sensitivity of their calculations, or use alternate methods.