Describing function
In control systems theory, the describing function (DF) method, developed by Nikolay Mitrofanovich Krylov and Nikolay Bogoliubov in the 1930s,[1][2] and extended by Ralph Kochenburger[3] is an approximate procedure for analyzing certain nonlinear control problems.
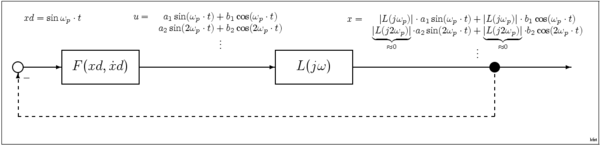
It is based on quasi-linearization, which is the approximation of the non-linear system under investigation by a linear time-invariant (LTI) transfer function that depends on the amplitude of the input waveform.
The describing function is one of the few widely applicable methods for designing nonlinear systems, and is very widely used as a standard mathematical tool for analyzing limit cycles in closed-loop controllers, such as industrial process controls, servomechanisms, and electronic oscillators.
Consider feedback around a discontinuous (but piecewise continuous) nonlinearity (e.g., an amplifier with saturation, or an element with deadband effects) cascaded with a slow stable linear system.
The continuous region in which the feedback is presented to the nonlinearity depends on the amplitude of the output of the linear system.
As the linear system's output amplitude decays, the nonlinearity may move into a different continuous region.
This is because such systems may possess intrinsic low-pass or bandpass characteristics such that harmonics are naturally attenuated, or because external filters are added for this purpose.
Although not a complete description of the system, the DFs often suffice to answer specific questions about control and stability.
Although the describing function method can produce reasonably accurate results for a wide class of systems, it can fail badly for others.
Counterexamples to the describing function method can be constructed for discontinuous dynamical systems when a rest segment destroys predicted limit cycles.