Ellipsoid
An ellipsoid is a surface that can be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
Every planar cross section is either an ellipse, or is empty, or is reduced to a single point (this explains the name, meaning "ellipse-like").
In this case, the ellipsoid is invariant under a rotation around the third axis, and there are thus infinitely many ways of choosing the two perpendicular axes of the same length.
Measuring angles directly to the surface of the ellipsoid, not to the circumscribed sphere, where γ would be geocentric latitude on the Earth, and λ is longitude.
[citation needed] In geodesy, the geodetic latitude is most commonly used, as the angle between the vertical and the equatorial plane, defined for a biaxial ellipsoid.
, one of the Carlson symmetric forms of elliptic integrals:[4] Simplifying the above formula using properties of RG,[5] this can also be expressed in terms of the volume of the ellipsoid V: Unlike the expression with F(φ, k) and E(φ, k), the equations in terms of RG do not depend on the choice of an order on a, b, and c. The surface area of an ellipsoid of revolution (or spheroid) may be expressed in terms of elementary functions: or or and which, as follows from basic trigonometric identities, are equivalent expressions (i.e. the formula for Soblate can be used to calculate the surface area of a prolate ellipsoid and vice versa).
In both cases e may again be identified as the eccentricity of the ellipse formed by the cross section through the symmetry axis.
The intersection of a plane and a sphere is a circle (or is reduced to a single point, or is empty).
Given: Ellipsoid x2/a2 + y2/b2 + z2/c2 = 1 and the plane with equation nxx + nyy + nzz = d, which have an ellipse in common.
Hence the intersection circle can be described by the parametric equation The reverse scaling (see above) transforms the unit sphere back to the ellipsoid and the vectors e0, e1, e2 are mapped onto vectors f0, f1, f2, which were wanted for the parametric representation of the intersection ellipse.
[10][11][12] The description of the pins-and-string construction of ellipsoids and hyperboloids is contained in the book Geometry and the imagination written by D. Hilbert & S. Vossen,[13] too.
Equations for the semi-axes of the generated ellipsoid can be derived by special choices for point P: The lower part of the diagram shows that F1 and F2 are the foci of the ellipse in the xy-plane, too.
From the upper diagram we see that S1 and S2 are the foci of the ellipse section of the ellipsoid in the xz-plane and that r2z = r2x − a2.
[14] The converse statement is true, too: if one chooses a second string of length l and defines then the equations are valid, which means the two ellipsoids are confocal.
The spectral theorem can again be used to obtain a standard equation of the form The volume of an n-dimensional hyperellipsoid can be obtained by replacing Rn by the product of the semi-axes a1a2...an in the formula for the volume of a hypersphere: (where Γ is the gamma function).
then the set of points x that satisfy the equation is an n-dimensional ellipsoid centered at v. The expression
[18]: 67 The eigenvectors of A are the principal axes of the ellipsoid, and the eigenvalues of A are the reciprocals of the squares of the semi-axes (in three dimensions these are a−2, b−2 and c−2).
[19] In particular: An invertible linear transformation applied to a sphere produces an ellipsoid, which can be brought into the above standard form by a suitable rotation, a consequence of the polar decomposition (also, see spectral theorem).
If the linear transformation is represented by a symmetric 3 × 3 matrix, then the eigenvectors of the matrix are orthogonal (due to the spectral theorem) and represent the directions of the axes of the ellipsoid; the lengths of the semi-axes are computed from the eigenvalues.
The key to a parametric representation of an ellipsoid in general position is the alternative definition: An affine transformation can be represented by a translation with a vector f0 and a regular 3 × 3 matrix A: where f1, f2, f3 are the column vectors of matrix A.
A parametric representation of an ellipsoid in general position can be obtained by the parametric representation of a unit sphere (see above) and an affine transformation: If the vectors f1, f2, f3 form an orthogonal system, the six points with vectors f0 ± f1,2,3 are the vertices of the ellipsoid and |f1|, |f2|, |f3| are the semi-principal axes.
A surface normal vector at point x(θ, φ) is For any ellipsoid there exists an implicit representation F(x, y, z) = 0.
Ellipsoids and cuboids rotate stably along their major or minor axes, but not along their median axis.
[22] One practical effect of this is that scalene astronomical bodies such as Haumea generally rotate along their minor axes (as does Earth, which is merely oblate); in addition, because of tidal locking, moons in synchronous orbit such as Mimas orbit with their major axis aligned radially to their planet.
A spinning body of homogeneous self-gravitating fluid will assume the form of either a Maclaurin spheroid (oblate spheroid) or Jacobi ellipsoid (scalene ellipsoid) when in hydrostatic equilibrium, and for moderate rates of rotation.
At faster rotations, non-ellipsoidal piriform or oviform shapes can be expected, but these are not stable.
The calculations include the force required to translate through a fluid and to rotate within it.
Applications include determining the size and shape of large molecules, the sinking rate of small particles, and the swimming abilities of microorganisms.
When they exist, the density functions f have the structure: where k is a scale factor, x is an n-dimensional random row vector with median vector μ (which is also the mean vector if the latter exists), Σ is a positive definite matrix which is proportional to the covariance matrix if the latter exists, and g is a function mapping from the non-negative reals to the non-negative reals giving a finite area under the curve.
[24] The multivariate normal distribution is the special case in which g(z) = exp(−z/2) for quadratic form z.





| S 1 S 2 | , length of the string (red)


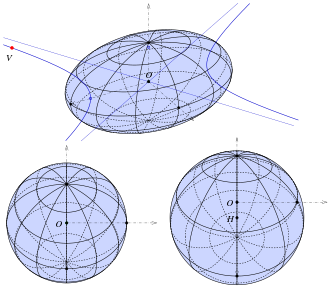
Bottom: parallel and central projection of the ellipsoid such that it looks like a sphere, i.e. its apparent shape is a circle

