Hyperbolic navigation
Such systems rely on the ability of two widely separated stations to broadcast a signal that is highly correlated in time.
Typical systems broadcast either short pulses at the same time, or continual signals that are identical in phase.
Determining the location of a receiver requires that the two synchronized stations be tuned in at the same time so the signals can be compared.
The sound of a shell being fired was received by several microphones, and the time of reception sent to a computing center to plot the location.
The first hyperbolic radio navigation system was the World War II-era Gee, introduced by the Royal Air Force for use by RAF Bomber Command.
Post war examples including the well-known US Coast Guard Loran-C, the international Omega system, and the Soviet Alpha and CHAYKA.
In 2023 a prototype navigation system was tested based on detection of muon subatomic particles coming with cosmic rays, which would work underground and underwater.
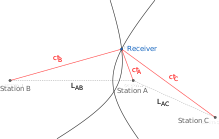
[1][2] Consider two ground-based radio stations located at a set distance from each other, say 300 km so that they are nearly exactly 1 ms apart at light speed.
With any additional source of navigation information, one of these two intersections can be eliminated as a possibility, and thus reveal their exact location, or "fix".
The radar display systems for Chain Home were based on oscilloscopes (or oscillographs as they were known at time) triggered to start their sweep when the broadcast signal was sent.
This is a similar determination as in the case with direct timing/distance measurements, but the hyperbolic system consists of nothing more than a conventional radio receiver hooked to an oscilloscope.
They would then tune a local oscillator that triggered the oscilloscope's trace so that it matched the clock at the primary station (which could, and did, change over time).
Next, they would use a variable delay that was added to the local oscillators signal to move the entire display back or forth so one of the "A" pulses was at the very left side of the 'scope (the action is identical to the "horizontal hold" dial on an analog television).
Gee was immediately selected for the 8th Air Force and the Project 3 team turned their attention to other uses, eventually considering convoy navigation in particular.
The resulting system emerged as LORAN, for LOng RAnge Navigation, and the first chain of two stations went live in June 1942.
Additionally, the originally steady repetition of the pulses was later modified to create another eight unique patterns, allowing a total of 96 station pairs.
Initially developed for the Royal Navy as an accurate adjunct to naval versions of Gee, Decca was first used on 5 June 1944 to guide minesweepers in preparation for the D-Day invasions.
A number of stations were updated in the 1990s, but the widespread use of GPS led to Decca being turned off at midnight on 31 March 2000.
The use of longer wavelengths gave better propagation than either Gee or LORAN, although ranges were generally limited to around 500 miles for the basic system.
Decca thus found itself in great demand for helicopter use, where runway approach aids like ILS and VOR were not suitable for the small airfields and essentially random locations the aircraft were used.
This was not a serious concern for ships, who could afford to wait out storms, but made it unsuitable for long-range air navigation where time was of the essence.
Hoping for the best, early experiments with "LF Loran" instead proved that accuracy was far worse than predicted, and efforts along these lines were dropped.
In this case the important feature was that the PLL allowed the re-construction of a continuous signal from a number of short pulses.
A system using PLLs could receive a single pulsed signal, like Gee, and then re-construct a continuous tone for phase measurement, like Decca.
LORAN-C remained in service well into the satellite navigation era, until GPS finally led to its shutdown on 8 February 2010.
The operator would then greatly magnify the display until they could see the varying signal within the blips, and then use phase comparison to accurately line up the timing.
He imagined a system specifically for medium-accuracy global navigation, and thus selected the extremely low frequency of 10 kHz as the basis for the signal.
These offered enough accuracy that they could be synchronized at their factory, shipped to the transmitter locations, and left running for years without the need to re-synchronize.
Calculation of the fix then proceeded in precisely the same fashion as Decca, although the much lower operating frequency led to much less accuracy.
Item (2) enables satnav systems to provide timing as well as position information, but requires a more complex solution algorithm.