Inertial navigation system
[4] Older INS systems generally used an inertial platform as their mounting point to the vehicle and the terms are sometimes considered synonymous.
accompanied with the initial orientation and thereafter computes its own updated position and velocity by integrating information received from the motion sensors.
One of the most common alternative sensors is a satellite navigation radio such as GPS, which can be used for all kinds of vehicles with direct sky visibility.
[11] The relative ease in ability to jam these systems has motivated the military to reduce navigation dependence on GPS technology.
[13] In 2012, the U.S. Army Research Laboratory reported a method to merge measurements from 10 pairs of MEMS gyroscope and accelerometers (plus occasional GPS), reducing the positional error by two thirds for a projectile.
The algorithm can correct for systemic biases in individual sensors, using both GPS and a heuristic based on the gun-firing acceleration force.
Early German World War II V2 guidance systems combined two gyroscopes and a lateral accelerometer with a simple analog computer to adjust the azimuth for the rocket in flight.
At the end of the war von Braun engineered the surrender of 500 of his top rocket scientists, along with plans and test vehicles, to the Americans.
In the early 1950s, the US government wanted to insulate itself against over-dependency on the German team for military applications, including the development of a fully domestic missile guidance program.
The MIT Instrumentation Laboratory (later to become the Charles Stark Draper Laboratory, Inc.) was chosen by the Air Force Western Development Division to provide a self-contained guidance system backup to Convair in San Diego for the new Atlas intercontinental ballistic missile [16][17][18][19] (Construction and testing were completed by Arma Division of AmBosch Arma).
The mathematics of this approach were fundamentally valid, but dropped because of the challenges in accurate inertial guidance and analog computing power.
A key feature of this approach allowed for the components of the vector cross product (v, xdv, /dt) to be used as the basic autopilot rate signals—a technique that became known as cross-product steering.
The Q-system was presented at the first Technical Symposium on Ballistic Missiles held at the Ramo-Wooldridge Corporation in Los Angeles on 21 and 22 June 1956.
In February 1961 NASA awarded MIT a contract for preliminary design study of a guidance and navigation system for the Apollo program.
The KC-135A fleet was fitted with a single Carousel IV-E system that could operate as a stand-alone INS or can be aided by the AN/APN-81 or AN/APN-218 Doppler radar.
First, for each of the six degrees of freedom (x,y,z and θx, θy and θz), it integrates over time the sensed acceleration, together with an estimate of gravity, to calculate the current velocity.
The desire to use inertial guidance in the Minuteman missile and Project Apollo drove early attempts to miniaturize computers.
By mounting a pair of gyroscopes (of the same rotational inertia and spinning at the same speed in opposite directions) at right angles the precessions are cancelled and the platform will resist twisting.
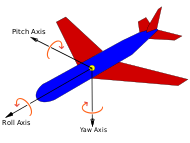
[citation needed] This system allows a vehicle's roll, pitch and yaw angles to be measured directly at the bearings of the gimbals.
The fluid bearings are pads with holes through which pressurized inert gas (such as helium) or oil presses against the spherical shell of the platform.
The data updating algorithms (direction cosines or quaternions) involved are too complex to be accurately performed except by digital electronics.
Strapdown systems are nowadays commonly used in commercial and military applications (aircraft, ships, ROVs, missiles, etc.).
This process has been FAA certified to recover pure INS performance equivalent to stationary alignment procedures for civilian flight times up to 18 hours.
The movement of the outer case with respect to the standing wave pattern is proportional to the total rotation angle and can be sensed by appropriate electronics.
The electrodes that drive and sense the standing waves are deposited directly onto separate quartz structures that surround the resonator.
[24] Safran manufactures large numbers of HRG based inertial navigation systems dedicated to a wide range of applications.
Such gyros operate in accordance with the dynamic theory that when an angle rate is applied to a translating body, a Coriolis force is generated.
Current state-of-the-art non-military technology (as of 2005[update]) can build small solid-state sensors that can measure human body movements.
In practice, at low rotation rates the output frequency can drop to zero as the result of backscattering causing the beams to synchronise and lock together.
Precise winding of the fiber-optic coil is required to ensure the paths taken by the light in opposite directions are as similar as possible.