Intersection (geometry)
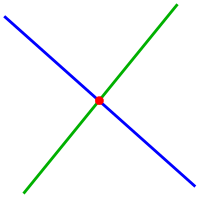
The simplest case in Euclidean geometry is the line–line intersection between two distinct lines, which either is one point (sometimes called a vertex) or does not exist (if the lines are parallel).
Other types of geometric intersection include: Determination of the intersection of flats – linear geometric objects embedded in a higher-dimensional space – is a simple task of linear algebra, namely the solution of a system of linear equations.
In general the determination of an intersection leads to non-linear equations, which can be solved numerically, for example using Newton iteration.
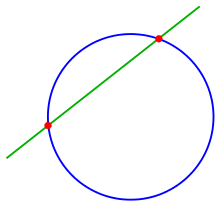
Intersection problems between a line and a conic section (circle, ellipse, parabola, etc.)
Intersections between quadrics lead to quartic equations that can be solved algebraically.
one gets, from Cramer's rule or by substituting out a variable, the coordinates of the intersection point
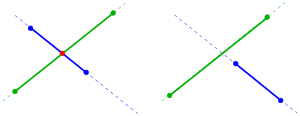
are the solution of the linear system It can be solved for s and t using Cramer's rule (see above).
Remark: Considering lines, instead of segments, determined by pairs of points, each condition
can be dropped and the method yields the intersection point of the lines (see above).
holds, there exists only one intersection point and the line is tangent to the circle.
[1] The intersection of a line and a parabola or hyperbola may be treated analogously.
The intersection of two disks (the interiors of the two circles) forms a shape called a lens.
The problem of intersection of an ellipse/hyperbola/parabola with another conic section leads to a system of quadratic equations, which can be solved in special cases easily by elimination of one coordinate.
Special properties of conic sections may be used to obtain a solution.
In general the intersection points can be determined by solving the equation by a Newton iteration.
The determination of intersection points always leads to one or two non-linear equations which can be solved by Newton iteration.
A list of the appearing cases follows: Any Newton iteration needs convenient starting values, which can be derived by a visualization of both the curves.
A parametrically or explicitly given curve can easily be visualized, because to any parameter t or x respectively it is easy to calculate the corresponding point.
In this case one has to determine a curve point with help of starting values and an iteration.
In practice one accelerates the intersection algorithm by using window tests.
In this case one divides the polygons into small sub-polygons and determines the smallest window (rectangle with sides parallel to the coordinate axes) for any sub-polygon.
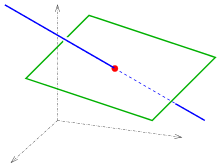
The intersection of a line and a plane in general position in three dimensions is a point.
If the linear equation has no solution, the line either lies on the plane or is parallel to it.
Like the case of a line and a plane, the intersection of a curve and a surface in general position consists of discrete points, but a curve may be partly or totally contained in a surface.
The most simple case is the intersection line of two non-parallel planes.
When the intersection of a sphere and a plane is not empty or a single point, it is a circle.
Then AOE and BOE are right triangles with a common side, OE, and hypotenuses AO and BO equal.
Now consider a point D of the circle C. Since C lies in P, so does D. On the other hand, the triangles AOE and DOE are right triangles with a common side, OE, and legs EA and ED equal.
Therefore, the hypotenuses AO and DO are equal, and equal to the radius of S, so that D lies in S. This proves that C is contained in the intersection of P and S. As a corollary, on a sphere there is exactly one circle that can be drawn through three given points.
[6] The proof can be extended to show that the points on a circle are all a common angular distance from one of its poles.