ExoMars
The second part of the programme was planned to launch in July 2020, when the Kazachok lander would have delivered the Rosalind Franklin rover on the surface, supporting a science mission that was expected to last into 2022 or beyond.
[7] TGO entered Mars orbit on 19 October 2016 and proceeded to map the sources of methane (CH4) and other trace gases present in the Martian atmosphere that could be evidence for possible biological or geological activity.
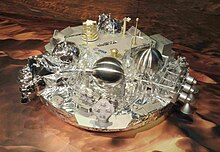
The Schiaparelli experimental lander separated from TGO on 16 October and was maneuvered to land in Meridiani Planum, but it crashed on the surface of Mars.
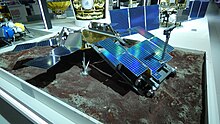
[9] In June 2023, a Roscosmos lander named Kazachok ("little Cossack", referring to a folk dance),[10] was due to deliver the ESA Rosalind Franklin rover to the Martian surface.
[16] As of April 2024, the mission has received new funding to restart construction and delivery of the Rosalind Franklin rover and NASA has agreed to provide the launch, currently scheduled for late 2028.
[19][20] Originally, the ExoMars concept consisted of a large robotic rover being part of ESA's Aurora Programme as a Flagship mission and was approved by the European Space Agency ministers in December 2005.
Originally conceived as a rover with a stationary ground station, ExoMars was planned to launch in 2011 aboard a Russian Soyuz Fregat rocket.
[23] The Aurora program was initiated in 2002 with support of twelve nations: Austria, Belgium, France, Germany, Italy, the Netherlands, Portugal, Spain, Sweden, Switzerland, the United Kingdom and Canada[23] In 2007, Canadian-based technology firm MacDonald Dettwiler and Associates Ltd. (MDA) was selected for a one-million-euro contract with EADS Astrium of Britain to design and build a prototype Mars rover chassis for the European Space Agency.
[24] In July 2009 NASA and ESA signed the Mars Exploration Joint Initiative, which proposed to utilise an Atlas rocket launcher instead of a Soyuz, which significantly altered the technical and financial setting of the ExoMars mission.
Specifically, ESA secured a Russian Proton rocket as a "backup launcher" for the ExoMars rover, which would include Russian-made parts.
[31] Under the FY2013 Budget President Obama released on 13 February 2012, NASA terminated its participation in ExoMars due to budgetary cuts in order to pay for the cost overruns of the James Webb Space Telescope.
[20][34] On 14 March 2013, representatives of the ESA and the Russian space agency (Roscosmos), signed a deal in which Russia became a full partner.
[41] ESA has not ruled out a possible partial return of NASA to the 2018 portion of ExoMars, albeit in a relatively minor role.
[43][44] On 25 January 2013, Roscosmos fully funded the development of the scientific instruments to be flown on the first launch, the Trace Gas Orbiter (TGO).
[46] The spacecraft containing ExoMars Trace Gas Orbiter (TGO) and Schiaparelli launched on 14 March 2016 09:31 UTC (Livestream began at 08:30 GMT [03:30 AM EDT]).
[49] Shortly after separation from the probes, the Briz-M upper booster stage possibly exploded a few kilometers away, however apparently without damaging the orbiter or lander.
[57] However, in November, the European Space Agency member states pledged 360 million euros towards the Rosalind Franklin rover, including covering the cost of replacing Russian components.
Now planned to launch in 2028, the rover will carry a next-generation mass spectrometer, the Mars Organic Molecule Analyzer, or MOMA.
[17] On 16 April 2024, ESA announced a memorandum of understanding with NASA to provide the launch service in late 2028, and that the next mission milestone is the preliminary design review in June 2024.
NASA provided an Electra telecommunications relay and navigation instrument to ensure communications between probes and rovers on the surface of Mars and controllers on Earth.
No signal indicating a successful landing was received,[68] and on 21 October 2016 NASA released a Mars Reconnaissance Orbiter image showing what appears to be the lander crash site.
The soft landing should have taken place on Meridiani Planum[67] during the dust storm season, which would have provided a unique chance to characterise a dust-laden atmosphere during entry and descent, and to conduct surface measurements associated with a dust-rich environment.
The carrier module has 16 hydrazine powered thrusters, 6 solar arrays that will provide electricity, Sun sensors and star trackers for navigation.
Unlike Kazachok, the European lander does not carry solar panels nor science instruments, and is expected to only operate for a few sols.
[94] Scientific requirements include landing in an area with 3.6 billion years old sedimentary rocks that are a record of the past wet habitable environment.
[102] Later that year, a flyover video of the landing site was released, created using high-accuracy 3D models of the terrain obtained from HiRISE.