Mobile Servicing System
Launched to the ISS in 2001, it plays a key role in station assembly and maintenance; it moves equipment and supplies around the station, supports astronauts working in space, and services instruments and other payloads attached to the ISS and is used for external maintenance.
Astronauts receive specialized training to enable them to perform these functions with the various systems of the MSS.
Launched on STS-100 in April 2001, this second generation arm is a larger, more advanced version of the Space Shuttle's original Canadarm.
The arm is capable of handling large payloads of up to 116,000 kg (256,000 lb) and was able to assist with docking the space shuttle.
PDGFs located around the station provide power, data and video to the arm through either of its two Latching End Effectors (LEEs).
The arm can also travel the entire length of the space station truss using the Mobile Base System.
In addition to this is the Display and Control Panel (DCP) and the Portable Computer System (PCS) laptop.
In recent years, the majority of robotic operations are commanded remotely by flight controllers on the ground at Christopher C. Kraft Jr. Mission Control Center, or from the Canadian Space Agency's John H. Chapman Space Centre.
Some time before 12 May 2021 Canadarm2 was hit by a small piece of orbital debris damaging its thermal blankets and one of the booms.
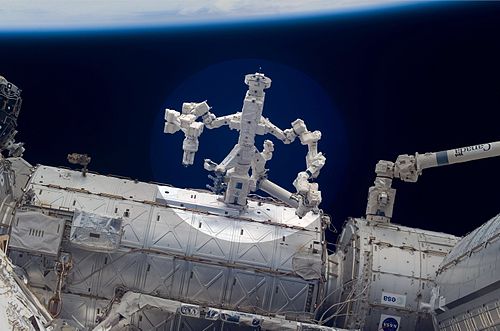
The Special Purpose Dexterous Manipulator, or "Dextre", is a smaller two-armed robot that can attach to Canadarm2, the ISS, or the Mobile Base System.
The platform rests atop the Mobile Transporter[6] (installed on STS-110, designed by Northrop Grumman in Carpinteria, CA), which allows it to glide 108 metres down rails on the station's main truss.
The MBS gives the two robotic arms the ability to travel to work sites all along the truss structure and to step off onto grapple fixtures along the way.
It has locations to store tools and equipment, foot-restraints, handrails and safety tether attachment points as well as a camera assembly.
The station received a second robotic arm during STS-124, the Japanese Experiment Module Remote Manipulator System (JEM-RMS).