Canadarm
[1] In 1975, NASA and the Canadian National Research Council (NRC) signed a memorandum of understanding that Canada would develop and construct the Canadarm.
Anthony "Tony" Zubrzycki, a design engineer at DSMA ATCON,[4] while seconded to SPAR, originated the concept for the Canadarm End Effector, inspired by an elastic band around his fingers.
The three-wire crossover design won over the claw-like mechanisms and others, such as the camera iris model,[4] that were being considered.
Other electronic interfaces, servo amplifiers, and power conditioners located on the Canadarm were designed and built by SPAR at its Montreal factory.
The Space Shuttle flight software that monitors and controls the Canadarm was developed in Houston, Texas, by the Federal Systems Division of IBM.
The term was originally coined by Dr. Wally Cherwinski for use by Larkin Kerwin during his speech at the press conference.
[5] Astronaut Judith Resnik developed the NASA software and onboard operating procedures for the system.
[8] In the mid-1990s, the arm control system was redesigned to increase the payload capability to 586,000 pounds (266,000 kg) in order to support space station assembly operations.
[3] NASA, therefore, developed a model of the arm for use at its training facility within the Johnson Space Center located in Houston, Texas.
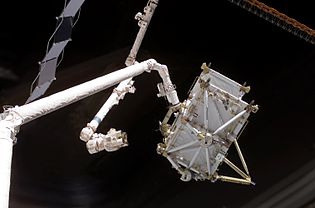
The Canadarm can also retrieve, repair and deploy satellites, provide a mobile extension ladder for extravehicular activity crew members for work stations or foot restraints, and be used as an inspection aid to allow the flight crew members to view the orbiter's or payload's surfaces through a television camera on the Canadarm.
This safety system would have allowed the Orbiter's payload bay doors to be closed in the event that the arm failed in an extended position and was not able to be retracted.