Motion simulator
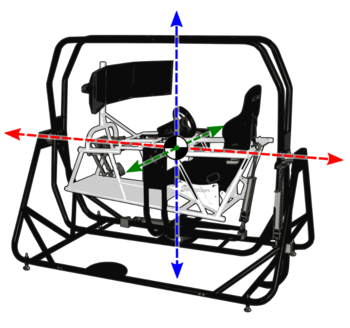
Motion platforms can provide movement in all of the six degrees of freedom (DOF) that can be experienced by an object that is free to move, such as an aircraft or spacecraft:.
When wind was present, the pilot in training was able to use the aircraft's control surfaces to move the model in the three rotational degrees of freedom pitch, roll and yaw.
Simulator motion platforms today use 6 jacks ("Hexapods") giving all six degrees-of-freedom, the three rotations pitch, roll and yaw, plus the three translational movements heave (up and down), sway (sideways) and surge (longitudinal).
Also in entertainment devices in theme parks, with users from single people to many, seated in rows in front of screens in which pictures are projected, synchronised with motions from the platform under the simulator cab.
[5] The lower-cost systems include home-based motion platforms, which have recently become a more common device used to enhance video games, simulation, and virtual reality.
Most of these systems were developed mainly by flight simulation enthusiasts, were sold as do it yourself projects, and could be assembled in the home from common components for around one thousand US dollars ($1,000).
This type of testing allows the simulation of "seeded faults" (i.e. an intentional hydraulic leak, software error, or computer shutdown) which serve to validate that an aircraft's redundant design features work as intended.
A test pilot can also help identify system deficiencies such as inadequate or missing warning indicators, or even unintended control stick motion.
While 6 degree-of-freedom motion is not necessary for this type of testing, the visual screen allows the pilot to "fly" the aircraft while the faults are simultaneously triggered.
Some examples: Some driving and flying simulation games allow the use of specialized controllers such as steering wheels, foot pedals or joysticks.
Motion gaming chairs can roll to the left and right and pitch forward and backward to simulate turning corners, accelerations and decelerations.
The way we perceive our body and our surroundings is a function of the way our brain interprets signals from our various sensory systems, such as sight, sound, balance and touch.
These reflexes, which are key to successful motion synchronization, are under the control of three classes of sensory input: Proprioceptors are receptors located in muscles, tendons, joints and gut, which send signals to the brain in proportion to accelerations to which the body is subject.
The human eye is an important source of information in motion simulation where a high resolution picture is available such as by day in good visibility.
As a result, it is essential for realistic simulation that cues from a motion platform (if fitted) works in synchronization to the external visual scene.
In order to be an effective training or entertainment device, the cues the brain receives by each of the body's sensory inputs must agree.
In this case, leaning a simulator backwards and rotating the visual picture by the same angle gives the subject a force on the back that is perceived as forward acceleration.
These findings are supported by early studies showing that human movement kinematics is represented by characteristics of jerk profiles.
This allows the higher level dynamics of the computed vehicle to provide realistic cues for human perception, while remaining within the limitations of the simulator.
Typically, to find position, the low-pass filter (in a continuous-time setting) is represented in the s-domain with the following transfer function:
[22] The present practice for empirically determining the parameters within the washout filter is a trial and error subjective tuning process whereby a skilled evaluation pilot flies predetermined maneuvers.
For example, the algorithm described by Daniel and Augusto computes a gain, α, as a function of the system states; thus, the washout is time varying.
The opposite outcome occurs when the magnitude of the platform states is small or decreasing, prolonging the motion cues which will be sustained for longer durations.
It is made up of a combination of empirically determined filters in which several of the coefficients are varied in a prescribed manner in order to minimize a set objective (cost) function.
Washout filters take advantage of the limitations of human sensing to the appearance of a larger simulation environment than actually exists.
For example, a pilot in a motion simulator may execute a steady, level turn for an extended period of time which would require the system stay at the associated bank angle.
In this situation, a washout filter allows the system to slowly move back to an equilibrium position at a rate below the threshold which the pilot can detect.
However, these slow, smooth dynamics do not exist in all practical simulation environments and diminish the returns of washout filters and a motion system.
It is for this reason that motion and washout filter based systems are often reserved for those that experience a limited range of flight conditions.
For instance, there have been reports of military pilots throwing off their vestibular system because of moving their heads around in the simulator similar to how they would in an actual aircraft to maintain their sensitivity to accelerations.