Piston motion equations
The reciprocating motion of a non-offset piston connected to a rotating crank through a connecting rod (as would be found in internal combustion engines) can be expressed by equations of motion.
This article shows how these equations of motion can be derived using calculus as functions of angle (angle domain) and of time (time domain).
The geometry of the system consisting of the piston, rod and crank is represented as shown in the following diagram: From the geometry shown in the diagram above, the following variables are defined:
The following variables are also defined: The frequency (Hz) of the crankshaft's rotation is related to the engine's speed (revolutions per minute) as follows: So the angular velocity (radians/s) of the crankshaft is: As shown in the diagram, the crank pin, crank center and piston pin form triangle NOP.
Position with respect to crank angle (from the triangle relation, completing the square, utilizing the Pythagorean identity, and rearranging): Velocity with respect to crank angle (take first derivative, using the chain rule): Acceleration with respect to crank angle (take second derivative, using the chain rule and the quotient rule): The angle domain equations above show that the motion of the piston (connected to rod and crank) is not simple harmonic motion, but is modified by the motion of the rod as it swings with the rotation of the crank.
This is in contrast to the Scotch Yoke which directly produces simple harmonic motion.
Example graphs of the angle domain equations are shown below.
Position with respect to time is simply: Velocity with respect to time (using the chain rule): Acceleration with respect to time (using the chain rule and product rule, and the angular velocity derivatives): From the foregoing, you can see that the time domain equations are simply scaled forms of the angle domain equations:
By definition, the velocity maxima and minima occur at the acceleration zeros (crossings of the horizontal axis).
The velocity maxima and minima (see the acceleration zero crossings in the graphs below) depend on rod length
The velocity maxima and minima do not necessarily occur when the crank makes a right angle with the rod.
For rod length 6" and crank radius 2" (as shown in the example graph below), numerically solving the acceleration zero-crossings finds the velocity maxima/minima to be at crank angles of ±73.17530°.
A single counter-example is sufficient to disprove the statement "velocity maxima/minima occur when crank makes a right angle with rod".
The graphs below show the angle domain equations for a constant rod length
Below is an animation of the piston motion equations with the same values of rod length and crank radius as in the graphs above.
This article uses units of inch (") for position, velocity and acceleration, as shown in the graphs above.

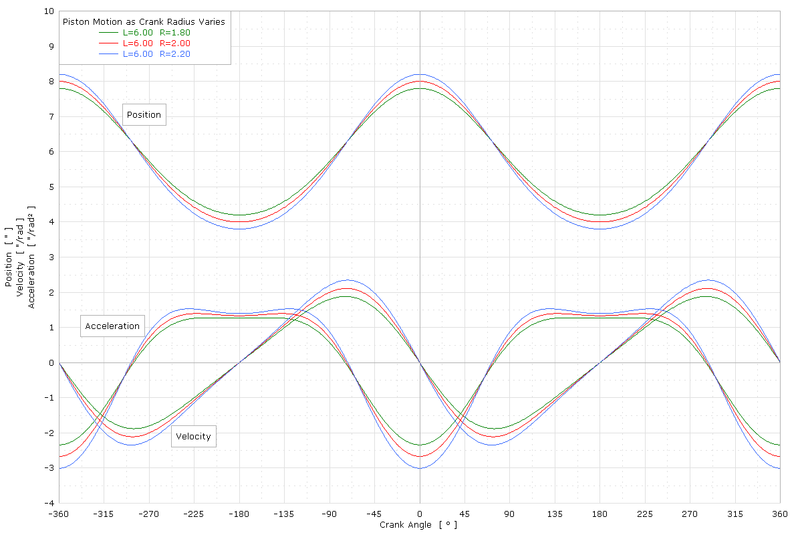
The horizontal axis units are crank angle degrees .