Robotic non-destructive testing
Robotic non-destructive testing (NDT) is a method of inspection used to assess the structural integrity of petroleum, natural gas, and water installations.
These systems transmit data and commands via either a wire (typically called an umbilical cable or tether) or wirelessly (in the case of battery-powered tetherless crawlers).
Angle beam inspections discover crack-like anomalies parallel to the pipe axis and metal loss defects that are too small to detect via direct beam, including the following: Besides its uses in unpiggable pipelines, the non-contact nature of EMAT tools makes this method ideal for dry applications where liquid couplant requirements may make traditional UT tools undesirable (e.g., natural gas lines).
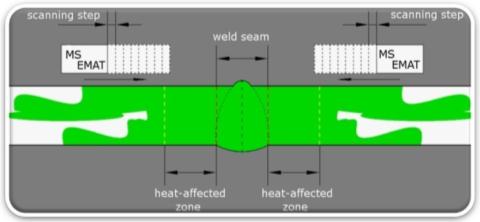
One angle-beam EMAT method employs a set of nine frequency-time (FT) scans on each side of the girth weld, where each frequency corresponds to a different input wave angle.
Technicians configure the laser (both angle of incidence and distance from the object) to ensure the shape is uniform on normal metal.
Photographs of these laser distortions provide visual evidence that improves the data analysis process and contributes to structural integrity efforts.
The tool processes the detected eddy current signal and compares it to a reference signal set before the tool run; the material properties are eliminated to give a reading for the average wall thickness within the area covered by the magnetic field.
[6] State regulations for inspecting pipelines vary based on the level of public safety concerns.
The federal Pipeline and Hazardous Materials Safety Administration (PHMSA) does not permit use of tetherless crawlers in HCAs due to the risk of getting stuck.
Williams used a tethered robotic ILI crawler to inspect an unpiggable section of the Transco Pipeline in New Jersey in 2015.
Because other ILI tools could not navigate the pipeline geometry common to each of the eleven pump stations along the pipeline, Alyeska received approval to use a tethered robotic ILI crawler manufactured by Diakont to complete an inspection project at Pump Station 3.