Sojourner (rover)
Sojourner was an experimental vehicle whose main mission was to test in the Martian environment technical solutions that were developed by engineers of the NASA research laboratories.
Careful analysis of the operations on Mars would make it possible to develop solutions to critical problems identified and to introduce improvements for subsequent planetary exploration missions.
The MET structure included three windsocks mounted at three heights on a pole, the topmost at about one meter (3.3 ft) and generally registered winds from the west.
[13] The square eyes of the IMP camera are separated by 15 cm (5.9 in) to provide stereoscopic vision and ranging performance to support rover operations.
The mast holds the camera at approximately 1.5 m (4.9 ft) above the Martian surface and extends Pathfinder's horizon to 3.4 km (2.1 miles) on a featureless plane.
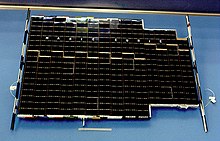
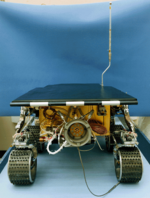
[14][20][21] Sojourner had solar panels and a non-rechargeable lithium-thionyl chloride (LiSOCl2) battery that could provide 150 watt-hours and allowed limited nocturnal operations.
[25][26] JPL's Don Bickler developed the wheels, which were referred to as "Rocker-bogie", for the experimental "Rocky" vehicles, of which the Sojourner is the eighth version.
[30] The locomotion system was found to be suitable for the environment of Mars—being very stable, and allowing forward and backward movements with similar ease[11]—and was adopted with appropriate precautions in the subsequent Spirit and Opportunity rover missions.
[26] The choice of a wheeled vehicle solved most of the stability problems, led to a reduction in weight, and improved efficiency and control compared to the previous solution.
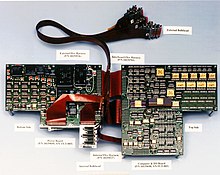
[11] Sojourner's central processing unit (CPU) was an Intel 80C85 with a 2 MHz clock, addressing 64 kilobytes (Kb) of memory, and running a cyclic executive.
[36] The mission was jeopardised by a concurrent software bug in the lander[37] that had been found in preflight testing but was deemed a glitch and given a low priority because it only occurred in certain unanticipated heavy-load conditions, and the focus was on verifying the entry and landing code.
[2] The Ultra high frequency (UHF) radio modems operated in half-duplex mode, meaning they could either send or receive data but not both at the same time.
[44] Both front cameras were coupled with five laser stripe projectors that enabled stereoscopic images to be taken along with measurements for hazard detection in the rover's path.
The rover driver would wear 3D goggles supplied with imagery from the base station and would move a virtual model with a specialized joystick.
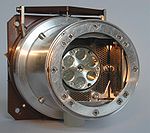
There are three components of the return radiation; simple Rutherford backscattering, production of protons from reactions with the nucleus of light elements, and generation of X-rays upon recombination of atomic shell vacancies created by alpha particle bombardment by interaction with the electrons of the innermost orbitals.
[14] The instrument was designed to detect the energy of all three components of the return radiation, making it possible to identify the atoms present and their quantities in a few tens of micrometers below the surface of the analyzed sample.
Combining all three measurements makes APXS sensitive to all elements with the exception of hydrogen that is present at concentration levels above a fraction of one percent.
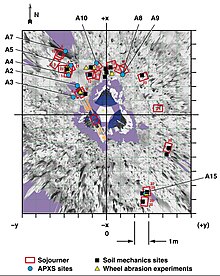
[53] The interpretation of the results proposed by Ferguson et al. suggests the soil at the landing site is made up of fine-grained dust of limited hardness with a grain size of less than 40 μm.
[53] The Materials Adherence Experiment (MAE) was designed by engineers at the Glenn Research Center to measure the daily accumulation of dust on the back of the rover and the reduction in the energy-conversion capacity of the photovoltaic panels.
[52] Since it was established transmissions relating to driving the Sojourner would occur once every sol, the rover was equipped with a computerized control system to guide its movements independently.
During the communication session (once per sol), the rover received from Earth a command string containing the coordinates of the arrival point, which it would have to reach autonomously.
[60]To test robotic prototypes and applications under natural lighting conditions, JPL built a simulated Martian landscape called "Mars Yard".
[63] Some 3,500 papers were received from countries including Canada, India, Israel, Japan, Mexico, Poland, Russia, and the United States, of which 1,700 were from students aged between 5 and 18.
The winners were chosen on the basis of the quality and creativity of the work, the appropriateness of the name for a Martian rover, and the competitor's knowledge of the heroine and the probe mission.
[63] The winning paper was written by 12-year-old Valerie Ambroise of Bridgeport, Connecticut, who suggested dedicating the rover to Sojourner Truth,[64] a Civil War era African-American abolitionist and women's rights advocate.
Third place went to Adam Sheedy, 16, of Round Rock, Texas, who chose Judith Resnik, a United States astronaut and Space Shuttle crew member who died in the 1986 Challenger disaster.
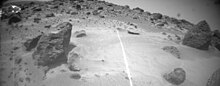
It operated in Ares Vallis channel in the Chryse Planitia of the Oxia Palus quadrangle,[65] from July 5[66] to September 27, 1997, when the lander cut off communications with Earth.
Among them were Pop Tart, Ender, mini-Matterhorn, Wedge, Baker's Bench, Scooby Doo, Yogi, Barnacle Bill, Pooh Bear, Piglet, the Lamb, the Shark, Ginger, Souffle, Casper, Moe, and Stimpy.
[66][75] It has been suggested the conformation of the land close to the rock, even visually at a lower level than the surrounding surface, was derived from the evaporation of floodwater.
This could also be a consequence of sedimentation processes; rounded rocks of various sizes were discovered and the valley's shapes are compatible with a river channel environment.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




 Clickable image:
Clicking on the labels will open a new article.
Clickable image:
Clicking on the labels will open a new article.


