Steiner conic
The Steiner conic or more precisely Steiner's generation of a conic, named after the Swiss mathematician Jakob Steiner, is an alternative method to define a non-degenerate projective conic section in a projective plane over a field.
The usual definition of a conic uses a quadratic form (see Quadric (projective geometry)).
Another alternative definition of a conic uses a hyperbolic polarity.
The disadvantage of von Staudt's definition is that it only works when the underlying field has odd characteristic (i.e.,
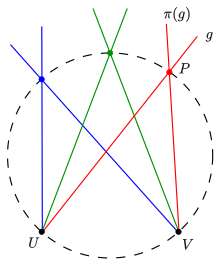
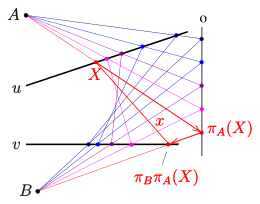
Simple example: If one shifts in the first diagram point
then the shift (translation) and the rotation generate a projective mapping
From the inscribed angle theorem one gets: The intersection points of corresponding lines form a circle.
Examples of commonly used fields are the real numbers
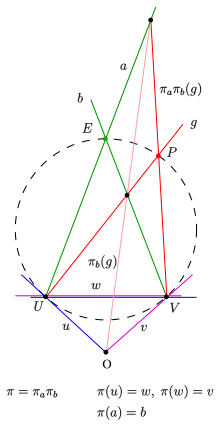
That means that, for the Steiner generation of a conic section, besides two points
These 5 items (2 points, 3 lines) uniquely determine the conic section.
Remark: The notation "perspective" is due to the dual statement: The projection of the points on a line
can be constructed and therefore the images of an arbitrary set of points.
are tangent lines of the generated conic section.
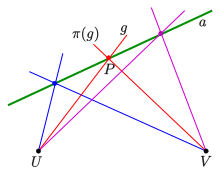
A proof that this method generates a conic section follows from switching to the affine restriction with line
as points at infinity of the x- and y-axis resp.
The affine part of the generated curve appears to be the hyperbola
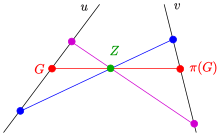
[2] Remark: Dualizing (see duality (projective geometry)) a projective plane means exchanging the points with the lines and the operations intersection and connecting.
A nondegenerate dual conic section is analogously defined by a quadratic form.
[7]) (2) Three points and their images are given: The following example is the dual one given above for a Steiner conic.
is an element of a non degenerate dual conic section.
The Steiner construction defines the conics in a planar linear incidence geometry (two points determine at most one line and two lines intersect in at most one point) intrinsically, that is, using only the collineation group.
For example, in the real coordinate plane, the affine type (ellipse, parabola, hyperbola) of
By contrast, the collineation group of the real hyperbolic plane
Further, unlike the Euclidean plane, there is no overlap between the direct
The direct case includes central (two perpendicular lines of symmetry) and non-central conics, whereas every opposite conic is central.
Even though direct and opposite central conics cannot be congruent, they are related by a quasi-symmetry defined in terms of complementary angles of parallelism.
[8] In fact, the central conics represent all genus 1 curves with real shape invariant
A minimal set of representatives is obtained from the central direct conics with common center and axis of symmetry, whereby the shape invariant is a function of the eccentricity, defined in terms of the distance between
, which manifest as either irreducible cubics or bi-circular quartics.
Using the elliptic curve addition law on each trajectory, every general central conic in