Tianwen-1
The mission's scientific objectives include: investigation of Martian surface geology and internal structure, search for indications of current and past presence of water, and characterization of the space environment and the atmosphere of Mars.
[4][31][32][33] In addition, China is the second nation to orbit and the first one to carry out landing and rovering mission on Mars successfully on its maiden attempt.
[50][51] After payload checkouts, the spacecraft began scientific operations with the Mars Energetic Particle Analyzer, mounted on the orbiter, which transmitted initial data back to ground control.
About nine minutes after the aeroshell housing the lander/rover combination entered the Martian atmosphere, the lander (carrying the rover) safely touched down in the Utopia Planitia region on Mars.
[53][54][55] After a period spent conducting system checkouts and other planning activities (including taking engineering images of itself), the lander deployed the Zhurong rover for independent surface operations.
[56] This rover is powered by solar panels and will probe the Martian surface with radar and conduct chemical analyses on the soil; it will also look for biomolecules and biosignatures.
The primary goal is therefore to validate China's deep space communications and control technologies, as well as the Administration's ability to successfully orbit and land spacecraft.
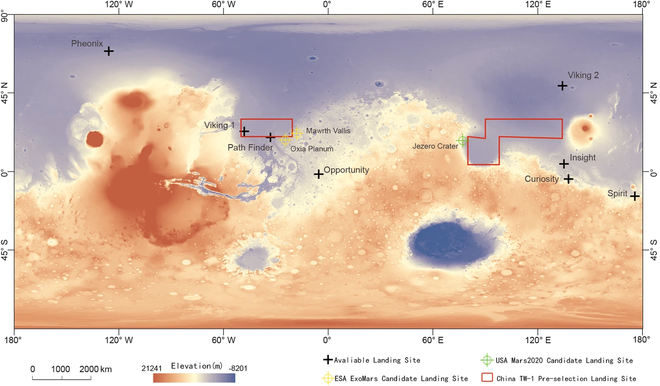
[47] CNSA initially focused on the Chryse Planitia and Elysium Mons regions of Mars in its search for possible landing sites.
However, in September 2019 during a joint meeting in Geneva, in Switzerland, of the European Planetary Science Congress-Division for Planetary Sciences, the presenters announced that two preliminary sites in the Utopia Planitia region of Mars have instead been chosen for the anticipated landing attempt, with each site having a landing ellipse of approximately 100 by 40 kilometres.
According to the site selection team, Amazonis Planitia was dropped from consideration upon further analysis due to the area's small thermal inertias and the possible presence of thick dust in the region; Chryse Planitia was eliminated next due to its rough terrain in terms of elevations, slopes, crater densities, and rock abundances.
)[65] The target landing regions in Utopia Planitia were favored by the selection team also because they present higher chances of finding evidence for the possible presence of ancient ocean on the northern lowlands of Mars.
[65] Using the HiRIC mosaics, the selection team conducted various terrain analyses on potential candidate landing ellipses within the primary target region in an iterative manner; these analyses included the determination of the candidate ellipse's average slope, the percentage of slope with an angle greater than 8%, average rock abundance, the percentage of area within the candidate ellipse with a rock abundance greater than 10%, and the percentage of cratered area.
[65] See the following figure produced by the landing selection team intended to illustrate the calculation of the hazard indices for candidate ellipses 16 and 128.
[13][14][66] On 19 May 2021, CNSA released for the first time images showing the preparation of the final transfer of the Zhurong rover from the platform of the lander to the Martian soil.
[67][54][55] The long delay for the publication of the first images is explained by the short periods of time when the Zhurong rover and the orbiter are in radio contact and can effectively communicate and transfer data.
The first images received on Earth after the rover deployment showed the empty landing platform and the extended rover-descent ramps.
[70][71] On 15 August 2021, Zhurong officially completed its planned exploration tasks and will continue to drive towards the southern part of Utopia Planitia where it landed.
[72] On 18 August 2021, Zhurong outlived its lifespan of 90 sols[73] and the Chinese scientists and engineers announced an extended expedition aiming to investigate an ancient coastal area on Mars.
[74] From mid-September to late October 2021, both the Tianwen-1 orbiter and Zhurong rover entered safe mode due to a communications blackout around solar conjunction.
[76] On 20 May 2022, Zhurong was put into hibernation mode to prepare for the approaching sandstorms and Martian winter, and was programmed to self-awake at an appropriate temperature and sunlight condition.
Argentina's Comisión Nacional de Actividades Espaciales (CONAE) is collaborating on Tianwen-1 by way of the Espacio Lejano tracking station installed in Las Lajas, Neuquén.
The Space Research Institute of the Austrian Academy of Sciences in Graz has confirmed the group's contribution to the Tianwen-1 magnetometer and helped with the calibration of the flight instrument.

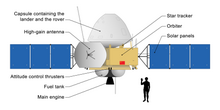














 Clickable image:
Clicking on the labels will open a new article.
Clickable image:
Clicking on the labels will open a new article.


