Wave radar
This article (see also Grønlie 2004), gives a brief description of the most common ground-based radar remote sensing techniques.
HF radars utilize the Bragg scattering mechanism and do always operate at very low grazing angles.
A continuous wave frequency modulated (CWFM) or pulsed radar waveform is normally used to provide range resolution.
One example of a microwave range finder is the Miros SM-094, which is designed to measure waves and water level, including tides.
From data on the elevation of the surface of the water at three or more locations, a directional spectrum of wave height can be computed.
The algorithm is similar to the one which generates a directional spectrum from data on heave (vertical motion), pitch and roll at a single location, as provided by a disc-shaped wave buoy.
The marine navigation radar operates in low grazing angle mode and wind generated surface ripple must be present.
The range gated pulsed Doppler microwave radar operates in low grazing angle mode.
The frequency separation is chosen to give a “spatial beat” length which is in the range of the water waves of interest.
The HF radar CODAR SeaSonde and Helzel WERA are well established as a powerful tool for sea current measurements up to a range of 300 km.
The angular resolution and accuracy depends on the used antenna array configuration and applied algorithms (direction finding or beam forming).
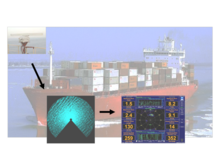
The FutureWaves technology was originally developed as an Environmental Ship and Motion Forecasting (ESMF) system for the Navy's ONR (Office of Naval Research) by General Dynamics' Applied Physical Sciences Corporation.
The result is an accurate representation of the propagating incident wave field that will force ship motions over a 2-3 minute window.
Finally, it uses the Gravity open architecture middleware solution to integrate the sensor feeds, processing subroutines and user displays.
This open architecture approach allows for the implementation of customized operator displays along with physics based models of specific vessels and machinery (e.g. cranes) into the system.