Sphere
A sphere (from Greek σφαῖρα, sphaîra)[1] is a geometrical object that is a three-dimensional analogue to a two-dimensional circle.
The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.
Manufactured items including pressure vessels and most curved mirrors and lenses are based on spheres.
[3] If a radius is extended through the center to the opposite side of the sphere, it creates a diameter.
Although the figure of Earth is not perfectly spherical, terms borrowed from geography are convenient to apply to the sphere.
In geometry unrelated to astronomical bodies, geocentric terminology should be used only for illustration and noted as such, unless there is no chance of misunderstanding.
[3] Mathematicians consider a sphere to be a two-dimensional closed surface embedded in three-dimensional Euclidean space.
Thus, a plane may be thought of as a sphere of infinite radius whose center is a point at infinity.
[7] This formula can also be derived using integral calculus (i.e., disk integration) to sum the volumes of an infinite number of circular disks of infinitesimally small thickness stacked side by side and centered along the x-axis from x = −r to x = r, assuming the sphere of radius r is centered at the origin.
[10] Another approach to obtaining the formula comes from the fact that it equals the derivative of the formula for the volume with respect to r because the total volume inside a sphere of radius r can be thought of as the summation of the surface area of an infinite number of spherical shells of infinitesimal thickness concentrically stacked inside one another from radius 0 to radius r. At infinitesimal thickness the discrepancy between the inner and outer surface area of any given shell is infinitesimal, and the elemental volume at radius r is simply the product of the surface area at radius r and the infinitesimal thickness.
At any given radius r,[note 1] the incremental volume (δV) equals the product of the surface area at radius r (A(r)) and the thickness of a shell (δr): The total volume is the summation of all shell volumes: In the limit as δr approaches zero[8] this equation becomes: Substitute V: Differentiating both sides of this equation with respect to r yields A as a function of r: This is generally abbreviated as: where r is now considered to be the fixed radius of the sphere.
Alternatively, the area element on the sphere is given in spherical coordinates by dA = r2 sin θ dθ dφ.
The surface area relative to the mass of a ball is called the specific surface area and can be expressed from the above stated equations as where ρ is the density (the ratio of mass to volume).
More generally, a sphere is uniquely determined by four conditions such as passing through a point, being tangent to a plane, etc.
[17] Several properties hold for the plane, which can be thought of as a sphere with infinite radius.
These properties are: The basic elements of Euclidean plane geometry are points and lines.
The sphere is a smooth surface with constant Gaussian curvature at each point equal to 1/r2.
[9] As per Gauss's Theorema Egregium, this curvature is independent of the sphere's embedding in 3-dimensional space.
Also following from Gauss, a sphere cannot be mapped to a plane while maintaining both areas and angles.
[9] A sphere of any radius centered at zero is an integral surface of the following differential form: This equation reflects that the position vector and tangent plane at a point are always orthogonal to each other.
For example, the diagram to the right shows the intersection of a sphere and a cylinder, which consists of two circles.
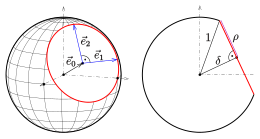
In navigation, a loxodrome or rhumb line is a path whose bearing, the angle between its tangent and due North, is constant.
Clelia curves approximate the ground track of satellites in polar orbit.
It is the solution of the non-linear system of equations (see implicit curve and the diagram) An ellipsoid is a sphere that has been stretched or compressed in one or more directions.
The sphere is the inverse image of a one-point set under the continuous function ‖x‖, so it is closed; Sn is also bounded, so it is compact by the Heine–Borel theorem.
More generally, in a metric space (E,d), the sphere of center x and radius r > 0 is the set of points y such that d(x,y) = r. If the center is a distinguished point that is considered to be the origin of E, as in a normed space, it is not mentioned in the definition and notation.
For example, in Zn with Euclidean metric, a sphere of radius r is nonempty only if r2 can be written as sum of n squares of integers.
The volume and area formulas were first determined in Archimedes's On the Sphere and Cylinder by the method of exhaustion.
Zenodorus was the first to state that, for a given surface area, the sphere is the solid of maximum volume.
[3] Archimedes wrote about the problem of dividing a sphere into segments whose volumes are in a given ratio, but did not solve it.