3D reconstruction from multiple images
The essence of an image is a projection from a 3D scene onto a 2D plane, during which process the depth is lost.
In recent decades, there is an important demand for 3D content for computer graphics, virtual reality and communication, triggering a change in emphasis for the requirements.
Many existing systems for constructing 3D models are built around specialized hardware (e.g. stereo rigs) resulting in a high cost, which cannot satisfy the requirement of its new applications.
Camera calibration will be used to identify where the many meshes created by depth maps can be combined to develop a larger one, providing more than one view for observation.
will satisfy (1) with any 4 × 4 nonsingular matrix T. A projective reconstruction can be calculated by correspondence of points only without any a priori information.
In auto-calibration or self-calibration, camera motion and parameters are recovered first, using rigidity.
Two methods implementing this idea are presented as follows: With a minimum of three displacements, we can obtain the internal parameters of the camera using a system of polynomial equations due to Kruppa,[6] which are derived from a geometric interpretation of the rigidity constraint.
With K and by the method of Cholesky factorization one can obtain the intrinsic parameters easily: Recently Hartley [9] proposed a simpler form.
, where Then the Kruppa equations are rewritten (the derivation can be found in [9]) This method is based on the use of rigidity constraint.
With this idea the problem can be stratified into different sections: according to the amount of constraints available, it can be analyzed at a different level, projective, affine or Euclidean.
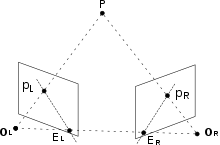
Suppose that a fixed scene is captured by two or more perspective cameras and the correspondences between visible points in different images are already given.
However, in practice, the matching is an essential and extremely challenging issue in computer vision.
The equations in homogeneous coordinates can be represented: So we can apply a nonsingular 4 × 4 transformation H to projections
See affine space for more detailed information about computing the location of the plane at infinity
The simplest way is to exploit prior knowledge, for example the information that lines in the scene are parallel or that a point is the one thirds between two others.
The intersection of several lines is the point at infinity in the motion direction, and one constraint on the affine structure.
By mapping the projective reconstruction to one that satisfies a group of redundant Euclidean constraints, we can find a projective transformation H in equation (2).The equations are highly nonlinear and a good initial guess for the structure is required.
[2] Inevitably, measured data (i.e., image or world point positions) is noisy and the noise comes from many sources.
In general, if ||Ax|| can be considered as a distance between the geometrical entities (points, lines, planes, etc.
Actually, there is no justification in minimizing an algebraic error apart from the ease of implementation, as it results in a linear problem.
The minimization of a geometric error is often a non-linear problem, that admit only iterative solutions and requires a starting point.
Since we are exposed to powerful magnetic fields during an MRI scan, this method is not suitable for patients with ferromagnetic metallic implants.
So, we discuss the following methods which can be performed while standing and require low radiation dose.
Though these techniques are 3-D imaging, the region of interest is restricted to a slice; data are acquired to form a time sequence.
This method is simple and implemented by identifying the points manually in multi-view radiographs.
The second step is to reconstruct the image in three dimensions using algorithms like Discrete Linear Transform (DLT).
SCP based techniques are not suitable for bony structures without identifiable edges.
Generally, SCP based techniques are used as part of a process involving other methods.
[15] This method uses X-ray images for 3D Reconstruction and to develop 3D models with low dose radiations in weight bearing positions.
The advantage of this method is it can be used for bony structures with continuous shape and it also reduced human intervention but they are time-consuming.