Comb filter
In signal processing, a comb filter is a filter implemented by adding a delayed version of a signal to itself, causing constructive and destructive interference.
The frequency response of a comb filter consists of a series of regularly spaced notches in between regularly spaced peaks (sometimes called teeth) giving the appearance of a comb.
Comb filters exist in two forms, feedforward and feedback; which refer to the direction in which signals are delayed before they are added to the input.
For instance, two loudspeakers playing the same signal at different distances from the listener, create a comb filtering effect on the audio.
[3] The general structure of a feedforward comb filter is described by the difference equation: where
The z transform of both sides of the equation yields: The transfer function is defined as: The frequency response of a discrete-time system expressed in the z-domain is obtained by substitution
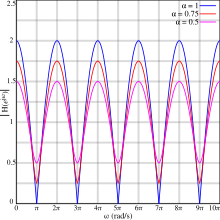
The graphs show the periodic magnitude response for various values of
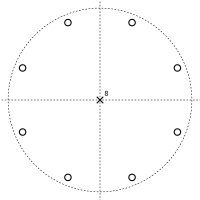
Looking again at the z-domain transfer function of the feedforward comb filter: the numerator is equal to zero whenever zK = −α.
This has K solutions, equally spaced around a circle in the complex plane; these are the zeros of the transfer function.
are on the left-hand side, and then taking the z transform: The transfer function is therefore: By substituting
[5] If stable, the response simply consists of a repeating series of impulses decreasing in amplitude over time.
This has K solutions, equally spaced around a circle in the complex plane; these are the poles of the transfer function.
The feedforward form may be described by the equation: where τ is the delay (measured in seconds).
This has the following transfer function: The feedforward form consists of an infinite number of zeros spaced along the jω axis (which corresponds to the Fourier domain).