Derivations of the Lorentz transformations
There are many ways to derive the Lorentz transformations using a variety of physical principles, ranging from Maxwell's equations to Einstein's postulates of special relativity, and mathematical tools, spanning from elementary algebra and hyperbolic functions, to linear algebra and group theory.
In the simplest case of two inertial frames the relative velocity between enters the transformation rule.
The usual treatment (e.g., Albert Einstein's original work) is based on the invariance of the speed of light.
However, this is not necessarily the starting point: indeed (as is described, for example, in the second volume of the Course of Theoretical Physics by Landau and Lifshitz), what is really at stake is the locality of interactions: one supposes that the influence that one particle, say, exerts on another can not be transmitted instantaneously.
Newton had himself called the idea of action at a distance philosophically "absurd", and held that gravity had to be transmitted by some agent according to certain laws.
[1] Michelson and Morley in 1887 designed an experiment, employing an interferometer and a half-silvered mirror, that was accurate enough to detect aether flow.
Norman Goldstein's paper shows a similar result using inertiality (the preservation of time-like lines) rather than causality.
Assume the second postulate of special relativity stating the constancy of the speed of light, independent of reference frame, and consider a collection of reference systems moving with respect to each other with constant velocity, i.e. inertial systems, each endowed with its own set of Cartesian coordinates labeling the points, i.e. events of spacetime.
To express the invariance of the speed of light in mathematical form, fix two events in spacetime, to be recorded in each reference frame.
For the Lorentz transformation to have the physical significance realized by nature, it is crucial that the interval is an invariant measure for any two events, not just for those separated by light signals.
[clarification needed] In those derivations, they use the constancy of the speed of light (invariance of light-like separated events) only.
To solve the general problem, one may use the knowledge about invariance of the interval of translations and ordinary rotations to assume, without loss of generality,[4] that the frames F and F′ are aligned in such a way that their coordinate axes all meet at t = t′ = 0 and that the x and x′ axes are permanently aligned and system F′ has speed V along the positive x-axis.
These do not appear as a solution to the simpler problem posed, while the boosts do (and sometimes rotations depending on angle of attack).
It is the presence of Lorentz boosts (for which velocity addition is different from mere vector addition that would allow for speeds greater than the speed of light) as opposed to ordinary boosts that separates it from the Galilean group of Galilean relativity.
The most general solution is, as can be verified by direct substitution using (H1),[4] To find the role of Ψ in the physical setting, record the progression of the origin of F′, i.e. x′ = 0, x = vt.
The Lorentz transformations can also be derived by simple application of the special relativity postulates and using hyperbolic identities.
[8] Start from the equations of the spherical wave front of a light pulse, centred at the origin:
Introducing the rapidity parameter ϕ as a hyperbolic angle allows the consistent identifications
If the signs were chosen differently the position and time coordinates would need to be replaced by −x and/or −t so that x and t increase not decrease.
The problem is usually restricted to two dimensions by using a velocity along the x axis such that the y and z coordinates do not intervene, as described in standard configuration above.
Consider two inertial frames of reference O and O′, assuming O to be at rest while O′ is moving with a velocity v with respect to O in the positive x-direction.
At this point γ is not necessarily a constant, but is required to reduce to 1 for v ≪ c. The inverse transformation is the same except that the sign of v is reversed:
So A and B are the unique constant coefficients necessary to preserve the constancy of the speed of light in the primed system of coordinates.
In his popular book[16] Einstein derived the Lorentz transformation by arguing that there must be two non-zero coupling constants λ and μ such that
Indeed, the four group axioms are satisfied: Consider two inertial frames, K and K′, the latter moving with velocity v with respect to the former.
By rotations and shifts we can choose the x and x′ axes along the relative velocity vector and also that the events (t, x) = (0,0) and (t′, x′) = (0,0) coincide.
where α, β, γ and δ are some yet unknown functions of the relative velocity v. Let us now consider the motion of the origin of the frame K′.
Now the function γ can not depend upon the direction of v because it is apparently the factor which defines the relativistic contraction and time dilation.
where the speed of light is a finite universal constant determining the highest possible relative velocity between inertial frames.
[17][18] In order to achieve this, it's necessary to write down coordinate transformations that include experimentally testable parameters.
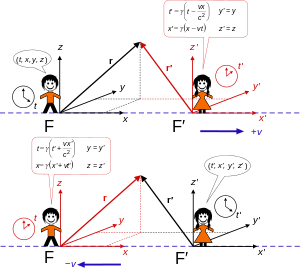
Top: frame F ′ moves at velocity v along the x -axis of frame F .
Bottom: frame F moves at velocity − v along the x ′-axis of frame F ′. [ 5 ]