Direct-quadrature-zero transformation
The direct-quadrature-zero (DQZ, DQ0[1] or DQO,[2] sometimes lowercase) or Park transformation (named after Robert H. Park) is a tensor that rotates the reference frame of a three-element vector or a three-by-three element matrix in an effort to simplify analysis.
[3] The Park transformation is often used in the context of electrical engineering with three-phase circuits.
The transformation can be used to rotate the reference frames of AC waveforms such that they become DC signals.
Simplified calculations can then be carried out on these DC quantities before performing the inverse transformation to recover the actual three-phase AC results.
The power-invariant, right-handed, uniformly-scaled Clarke transformation matrix is To convert an ABC-referenced column vector to the XYZ reference frame, the vector must be pre-multiplied by the Clarke transformation matrix: And, to convert back from an XYZ-referenced column vector to the ABC reference frame, the vector must be pre-multiplied by the inverse Clarke transformation matrix: The rotation converts vectors in the XYZ reference frame to the DQZ reference frame.
The rotation matrix is where θ is the instantaneous angle of an arbitrary ω frequency.
To convert an XYZ-referenced vector to the DQZ reference frame, the column vector signal must be pre-multiplied by the rotation matrix: And, to convert back from a DQZ-referenced vector to the XYZ reference frame, the column vector signal must be pre-multiplied by the inverse rotation matrix: The Park transformation is equivalent to the product of the Clarke transformation and a rotation: The inverse transformation is: To convert an ABC-referenced vector to the DQZ reference frame, the column vector signal must be pre-multiplied by the Park transformation matrix: And, to convert back from a DQZ-referenced vector to the ABC reference frame, the column vector signal must be pre-multiplied by the inverse Park transformation matrix: To understand this transformation better, a derivation of the transformation is included.
above caused the arbitrary vector to rotate backward when transitioned to the new DQ reference frame.
If the old reference frame were rotating forwards, such as in three-phase electrical systems, then the resulting DQ vector remains stationary.
A single matrix equation can summarize the operation above: This tensor can be expanded to three-dimensional problems, where the axis about which rotation occurs is left unaffected.
In the following example, the rotation is about the Z axis, but any axis could have been chosen: From a linear algebra perspective, this is simply a clockwise rotation about the z-axis and is mathematically equivalent to the trigonometric difference angle formulae.
So, the two-dimensional perspective is really showing the projection of the three-dimensional reality onto a plane.
This way the rotated C axis will be orthogonal to the plane of the two-dimensional perspective mentioned above.
The first step towards building the Clarke transformation requires rotating the ABC reference frame about the A axis.
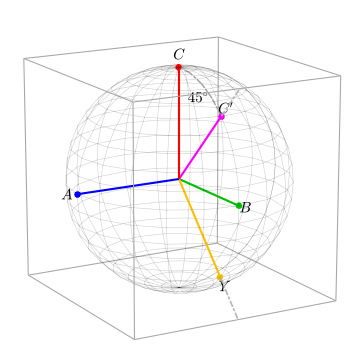
So, this time, the 1 will be in the first element of the Park transformation: The following figure shows how the ABC reference frame is rotated to the AYC' reference frame when any vector is pre-multiplied by the K1 matrix.
The C' and Y axes now point to the midpoints of the edges of the box, but the magnitude of the reference frame has not changed (i.e., the sphere did not grow or shrink).This is due to the fact that the norm of the K1 tensor is 1: ||K1|| = 1.
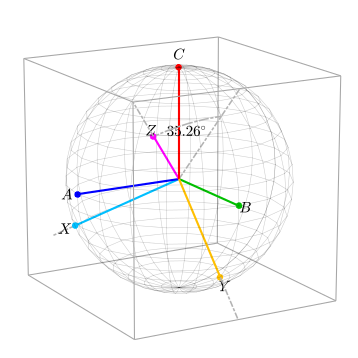
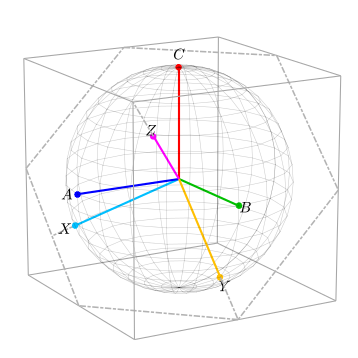
At this point, the Z axis is now orthogonal to the plane in which any ABC vector without a common-mode component can be found.
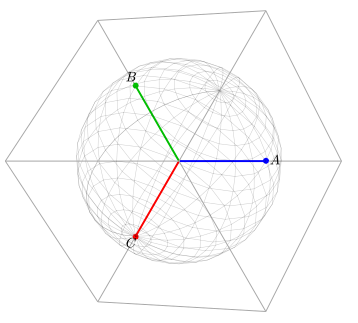
The following figure shows the common two-dimensional perspective of the ABC and XYZ reference frames.
If only the bottom row elements were changed to be 1/3, then the sphere would be squashed along the Z axis.
As things are written above, the norm of the Clarke transformation matrix is still 1, which means that it only rotates an ABC vector but does not scale it.
to the zero component to get the power-variant Clarke transformation matrix: or This will necessarily shrink the sphere by a factor of √2/3 as shown below.
With the power-variant Clarke transformation, the magnitude of the arbitrary vector is smaller in the XYZ reference frame than in the ABC reference frame (the norm of the transformation is √2/3), but the magnitudes of the individual vector components are the same (when there is no common mode).
The Park transformation is equivalent to applying the Clarke transformation to convert ABC-referenced vectors into two differential-mode components (i.e., X and Y) and one common-mode component (i.e., Z) and then a rotation to rotate the reference frame about the Z axis at some given angle.
The Park transformation is In electric systems, very often the A, B, and C values are oscillating in such a way that the net vector is spinning.
Very often, it is helpful to rotate the reference frame such that the majority of the changes in the ABC values, due to this spinning, are canceled out and any finer variations become more obvious.
The Park transformation can be thought of in geometric terms as the projection of the three separate sinusoidal phase quantities onto two axes rotating with the same angular velocity as the sinusoidal phase quantities.
Shown above is the Park transformation as applied to the stator of a synchronous machine.
The three phase currents are equal in magnitude and are separated from one another by 120 electrical degrees.
The DQ axes are shown rotating with angular velocity equal to
The transformation originally proposed by Robert H. Park[4] differs slightly from the one given above.