Vector control (motor)
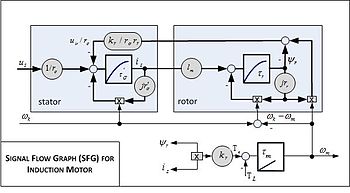
The pulse-width modulation of the variable-frequency drive defines the transistor switching according to the stator voltage references that are the output of the PI current controllers.
However, it is becoming increasingly attractive for lower performance applications as well due to FOC's motor size, cost and power consumption reduction superiority.
[5][6] Technische Universität Darmstadt's K. Hasse and Siemens' F. Blaschke pioneered vector control of AC motors starting in 1968 and in the early 1970s.
The novelty of Park's work involves his ability to transform any related machine's linear differential equation set from one with time varying coefficients to another with time invariant coefficients[15] resulting in a linear time-invariant system or LTI system.
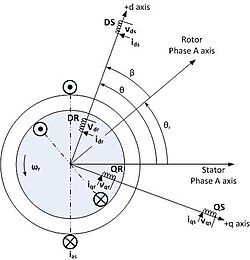
While (d,q) coordinate system rotation can arbitrarily be set to any speed, there are three preferred speeds or reference frames:[17] Decoupled torque and field currents can thus be derived from raw stator current inputs for control algorithm development.
[26] In DFOC, flux magnitude and angle feedback signals are directly calculated using so-called voltage or current models.
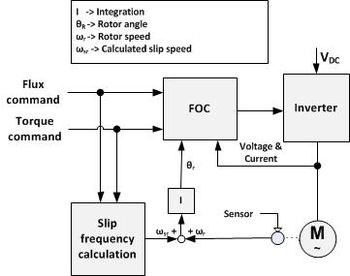
Sensorless control requires derivation of rotor speed information from measured stator voltage and currents in combination with open-loop estimators or closed-loop observers.
Thus the cost of the processor and other control hardware is lower making it suitable for applications where the ultimate performance of DTC is not required.