Dynamical system
Examples include the mathematical models that describe the swinging of a clock pendulum, the flow of water in a pipe, the random motion of particles in the air, and the number of fish each springtime in a lake.
The most general definition unifies several concepts in mathematics such as ordinary differential equations and ergodic theory by allowing different choices of the space and how time is measured.
[citation needed] Time can be measured by integers, by real or complex numbers or can be a more general algebraic object, losing the memory of its physical origin, and the space may be a manifold or simply a set, without the need of a smooth space-time structure defined on it.
[3] In order to make a prediction about the system's future behavior, an analytical solution of such equations or their integration over time through computer simulation is realized.
Before the advent of computers, finding an orbit required sophisticated mathematical techniques and could be accomplished only for a small class of dynamical systems.
Numerical methods implemented on electronic computing machines have simplified the task of determining the orbits of a dynamical system.
The difficulties arise because: Many people regard French mathematician Henri Poincaré as the founder of dynamical systems.
In them, he successfully applied the results of their research to the problem of the motion of three bodies and studied in detail the behavior of solutions (frequency, stability, asymptotic, and so on).
His methods, which he developed in 1899, make it possible to define the stability of sets of ordinary differential equations.
In 1913, George David Birkhoff proved Poincaré's "Last Geometric Theorem", a special case of the three-body problem, a result that made him world-famous.
Combining insights from physics on the ergodic hypothesis with measure theory, this theorem solved, at least in principle, a fundamental problem of statistical mechanics.
In the late 20th century the dynamical system perspective to partial differential equations started gaining popularity.
[10] His pioneering work in applied nonlinear dynamics has been influential in the construction and maintenance of machines and structures that are common in daily life, such as ships, cranes, bridges, buildings, skyscrapers, jet engines, rocket engines, aircraft and spacecraft.
A dynamical system may be defined formally as a measure-preserving transformation of a measure space, the triplet (T, (X, Σ, μ), Φ).
In the construction a given measure of the state space is summed for all future points of a trajectory, assuring the invariance.
Linear dynamical systems can be solved in terms of simple functions and the behavior of all orbits classified.
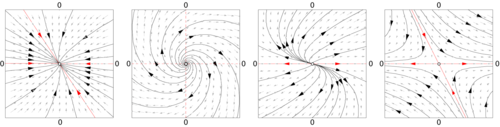
The case b ≠ 0 with A = 0 is just a straight line in the direction of b: When b is zero and A ≠ 0 the origin is an equilibrium (or singular) point of the flow, that is, if x0 = 0, then the orbit remains there.
It is in the neighborhood of singular points and periodic orbits that the structure of a phase space of a dynamical system can be well understood.
If the next time the orbit loops around phase space in a different way, then it is impossible to rectify the vector field in the whole series of patches.
The Taylor series of the map is F(x) = J · x + O(x2), so a change of coordinates h can only be expected to simplify F to its linear part This is known as the conjugation equation.
Finding conditions for this equation to hold has been one of the major tasks of research in dynamical systems.
Bifurcation theory considers a structure in phase space (typically a fixed point, a periodic orbit, or an invariant torus) and studies its behavior as a function of the parameter μ.
By using Taylor series approximations of the maps and an understanding of the differences that may be eliminated by a change of coordinates, it is possible to catalog the bifurcations of dynamical systems.
The Poincaré recurrence theorem was used by Zermelo to object to Boltzmann's derivation of the increase in entropy in a dynamical system of colliding atoms.
The hypothesis states that the length of time a typical trajectory spends in a region A is vol(A)/vol(Ω).
An observable a is a function that to each point of the phase space associates a number (say instantaneous pressure, or average height).
The value of an observable can be computed at another time by using the evolution function φ t. This introduces an operator U t, the transfer operator, By studying the spectral properties of the linear operator U it becomes possible to classify the ergodic properties of Φ t. In using the Koopman approach of considering the action of the flow on an observable function, the finite-dimensional nonlinear problem involving Φ t gets mapped into an infinite-dimensional linear problem involving U.
The Liouville measure restricted to the energy surface Ω is the basis for the averages computed in equilibrium statistical mechanics.
SRB measures replace the Boltzmann factor and they are defined on attractors of chaotic systems.
Works providing a broad coverage: Introductory texts with a unique perspective: Textbooks Popularizations: