Electroactive polymer
Electret was formed by combining carnauba wax, rosin and beeswax, and then cooling the solution while it is subject to an applied DC electrical bias.
Polymers that respond to environmental conditions, other than an applied electric current, have also been a large part of this area of study.
In 1949 Katchalsky et al. demonstrated that when collagen filaments are dipped in acid or alkali solutions, they would respond with a change in volume.
In the early 1990s, ionic polymer-metal composites (IPMCs) were developed and shown to exhibit electroactive properties far superior to previous EAPs.
IPMCs were shown to exhibit anywhere up to 380% strain, orders of magnitude larger than previously developed EAPs.
[1] In 1999, Yoseph Bar-Cohen proposed the Armwrestling Match of EAP Robotic Arm Against Human Challenge.
[5] Another major milestone of the field is that the first commercially developed device including EAPs as an artificial muscle was produced in 2002 by Eamex in Japan.
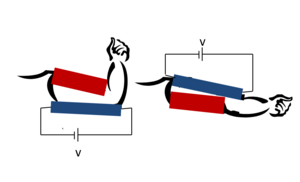
Dielectric EAPs are materials in which actuation is caused by electrostatic forces between two electrodes which squeeze the polymer.
Dielectric elastomers are capable of very high strains and are fundamentally a capacitor that changes its capacitance when a voltage is applied by allowing the polymer to compress in thickness and expand in area due to the electric field.
The side chains on neighboring backbone polymers cross link and form crystal units.
The backbone and side chain crystal units can then form polarized monomers, which contain atoms with partial charges and generate dipole moments, shown in Figure 2.
Potential applications of these fluids include shock absorbers, engine mounts and acoustic dampers.
[17] Ionic polymer-metal composites consist of a thin ionomeric membrane with noble metal electrodes plated on its surface.
Ionic polymer-metal composites work through electrostatic attraction between the cationic counter ions and the cathode of the applied electric field, a schematic representation is shown in Figure 3.
[20] Stimuli-responsive gels (hydrogels, when the swelling agent is an aqueous solution) are a special kind of swellable polymer networks with volume phase transition behaviour.
These materials change reversibly their volume, optical, mechanical and other properties by very small alterations of certain physical (e.g. electric field, light, temperature) or chemical (concentrations) stimuli.
[22] Combined with an excellent compatibility with micro-fabrication technologies, especially stimuli-responsive hydrogels are of strong increasing interest for microsystems with sensors and actuators.
These types of materials also have high mechanical energy density and can be operated in air without a major decrease in performance.
They however need to maintain wetness, though some polymers have been developed as self-contained encapsulated activators which allows their use in dry environments.
[25] Their ability to emulate the operation of biological muscles with high fracture toughness, large actuation strain and inherent vibration damping draw the attention of scientists in this field.
[25] In recent years, "electro active polymers for refreshable Braille displays"[26] has emerged to aid the visually impaired in fast reading and computer assisted communication.
Rows of electrodes on one side of an EAP film and columns on the other activate individual elements in the array.
Under computer control, dots would be activated to create tactile patterns of highs and lows representing the information to be read.
[28] These monolithic devices consist of an array of thousands of multimodal modulators (actuator pixels) based on stimuli-responsive hydrogels.
To avoid the electrolysis of water, hydrogel-based microfluidic devices are mainly based on temperature-responsive polymers with lower critical solution temperature (LCST) characteristics, which are controlled by an electrothermic interface.
[29] Microvalves based on stimuli-responsive hydrogels show some advantageous properties such as particle tolerance, no leakage and outstanding pressure resistance.
Due to their low modulus, the mechanical impedance of the actuators, they are well-matched to common optical membrane materials.

(b) A voltage is applied and the EAP fingers deform in order to release the ball.
(c) When the voltage is removed, the EAP fingers return to their original shape and grip the ball