Euclidean plane isometry
For example, suppose that the Euclidean plane is represented by a sheet of transparent plastic sitting on a desk.
(Note: the notations for the types of isometries listed below are not completely standardised.)
Reflections, or mirror isometries, denoted by Fc,v, where c is a point in the plane and v is a unit vector in R2.
Reflection in a parallel line corresponds to adding a vector perpendicular to it.
In terms of coordinates, rotations are most easily expressed by breaking them up into two operations.
), with determinant 1 (the other possibility for orthogonal matrices is −1, which gives a mirror image, see below).
Glide reflections, denoted by Gc,v,w, where c is a point in the plane, v is a unit vector in R2, and w is non-null a vector perpendicular to v are a combination of a reflection in the line described by c and v, followed by a translation along w. That is,
that is, we obtain the same result if we do the translation and the reflection in the opposite order.)
Alternatively we multiply by an orthogonal matrix with determinant −1 (corresponding to a reflection in a line through the origin), followed by a translation.
In all cases we multiply the position vector by an orthogonal matrix and add a vector; if the determinant is 1 we have a rotation, a translation, or the identity, and if it is −1 we have a glide reflection or a reflection.
A "random" isometry, like taking a sheet of paper from a table and randomly laying it back, "almost surely" is a rotation or a glide reflection (they have three degrees of freedom).
Adding more mirrors does not add more possibilities (in the plane), because they can always be rearranged to cause cancellation.
An isometry is completely determined by its effect on three independent (not collinear) points.
So suppose p1, p2, p3 map to q1, q2, q3; we can generate a sequence of mirrors to achieve this as follows.
We can recognize which of these isometries we have according to whether it preserves hands or swaps them, and whether it has at least one fixed point or not, as shown in the following table (omitting the identity).
Notice that the cancellation of a pair of identical reflections reduces the number of reflections by an even number, preserving the parity of the sequence; also notice that the identity has even parity.
Composition of isometries mixes kinds in assorted ways.
And two reflections give either a translation or a rotation, or the identity (which is both, in a trivial way).
We thus have two new kinds of isometry subgroups: all translations, and rotations sharing a fixed point.
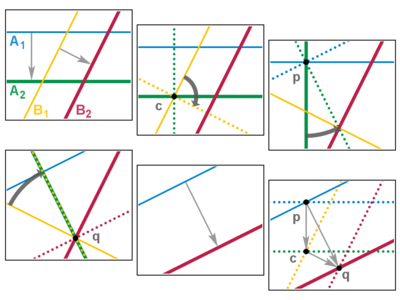
If two rotations share a fixed point, then we can swivel the mirror pair of the second rotation to cancel the inner mirrors of the sequence of four (two and two), leaving just the outer pair.
Again reassociating, we pivot the first pair around p to make B2″ pass through q, and pivot the second pair around q to make A1″ pass through p. The inner mirrors now coincide and cancel, and the outer mirrors are left parallel.
Also, the three pivot points form a triangle whose edges give the head-to-tail rule of vector addition: 2(p c) + 2(c q) = 2(p q).
The subgroup structure suggests another way to compose an arbitrary isometry: This works because translations are a normal subgroup of the full group of isometries, with quotient the orthogonal group; and rotations about a fixed point are a normal subgroup of the orthogonal group, with quotient a single reflection.
For example, the symmetries of a regular pentagon consist of rotations by integer multiples of 72° (360° / 5), along with reflections in the five mirrors which perpendicularly bisect the edges.
Curiously, only a few of the fixed-point groups are found to be compatible with discrete translations.
For example, the pentagon symmetries, D5, are incompatible with a discrete lattice of translations.
In terms of complex numbers, the isometries of the plane are either of the form
It is then easy to see that g is either the identity or the conjugation, and the statement being proved follows from this and from the fact that f(z) = a + ωg(z).
where the last expression shows the mapping equivalent to rotation at 0 and a translation.
As stated by Cederberg, "A direct isometry is either a rotation or a translation.