Euler's rotation theorem
In geometry, Euler's rotation theorem states that, in three-dimensional space, any displacement of a rigid body such that a point on the rigid body remains fixed, is equivalent to a single rotation about some axis that runs through the fixed point.
The theorem is named after Leonhard Euler, who proved it in 1775 by means of spherical geometry.
The extension of the theorem to kinematics yields the concept of instant axis of rotation, a line of fixed points.
In linear algebra terms, the theorem states that, in 3D space, any two Cartesian coordinate systems with a common origin are related by a rotation about some fixed axis.
The eigenvector corresponding to this eigenvalue is the axis of rotation connecting the two systems.
Quomodocunque sphaera circa centrum suum conuertatur, semper assignari potest diameter, cuius directio in situ translato conueniat cum situ initiali.
or (in English): When a sphere is moved around its centre it is always possible to find a diameter whose direction in the displaced position is the same as in the initial position.Euler's original proof was made using spherical geometry and therefore whenever he speaks about triangles they must be understood as spherical triangles.
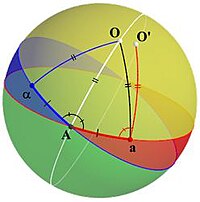
To arrive at a proof, Euler analyses what the situation would look like if the theorem were true.
To that end, suppose the yellow line in Figure 1 goes through the center of the sphere and is the axis of rotation we are looking for, and point O is one of the two intersection points of that axis with the sphere.
Otherwise we label A’s image as a and its preimage as α, and connect these two points to A with arcs αA and Aa.
The rotation axis is obviously orthogonal to this plane, and passes through the center C of the sphere.
Therefore, another version of Euler's theorem is that for every rotation R, there is a nonzero vector n for which Rn = n; this is exactly the claim that n is an eigenvector of R associated with the eigenvalue 1.
Use the two relations for any 3 × 3 matrix A and (since det(R) = 1) to compute This shows that λ = 1 is a root (solution) of the characteristic equation, that is, In other words, the matrix R − I is singular and has a non-zero kernel, that is, there is at least one non-zero vector, say n, for which The line μn for real μ is invariant under R, i.e., μn is a rotation axis.
Two matrices (representing linear maps) are said to be equivalent if there is a change of basis that makes one equal to the other.
In order to prove the previous equation some facts from matrix theory must be recalled.
[b] This result is equivalent to stating that normal matrices can be brought to diagonal form by a unitary similarity transformation: and U is unitary, that is, The eigenvalues α1, ..., αm are roots of the characteristic equation.
Let us only consider the case, then, of matrices R that are proper rotations (the third eigenvalue is just 1).
Approximating Δθ as θ/N where N is a large number, a rotation of θ about the axis may be represented as: It can be seen that Euler's theorem essentially states that all rotations may be represented in this form.
The product Aθ is the "generator" of the particular rotation, being the vector (x,y,z) associated with the matrix A.
This shows that the rotation matrix and the axis–angle format are related by the exponential function.
One can derive a simple expression for the generator G. One starts with an arbitrary plane (in Euclidean space) defined by a pair of perpendicular unit vectors a and b.
Analysis is often easier in terms of these generators, rather than the full rotation matrix.
Analysis in terms of the generators is known as the Lie algebra of the rotation group.
It follows from Euler's theorem that the relative orientation of any pair of coordinate systems may be specified by a set of three independent numbers.
Sometimes a redundant fourth number is added to simplify operations with quaternion algebra.
Rotation calculation via quaternions has come to replace the use of direction cosines in aerospace applications through their reduction of the required calculations, and their ability to minimize round-off errors.
Also, in computer graphics the ability to perform spherical interpolation between quaternions with relative ease is of value.
In higher dimensions, any rigid motion that preserves a point in dimension 2n or 2n + 1 is a composition of at most n rotations in orthogonal planes of rotation, though these planes need not be uniquely determined, and a rigid motion may fix multiple axes.
Also, any rigid motion that preserves n linearly independent points, which span an n-dimensional body in dimension 2n or 2n + 1, is a single plane of rotation.
To put it another way, if two rigid bodies, with identical geometry, share at least n points of 'identical' locations within themselves, the convex hull of which is n-dimensional, then a single planar rotation can bring one to cover the other accurately in dimension 2n or 2n + 1.