Four-bar linkage
It consists of four bodies, called bars or links, connected in a loop by four joints.
Generally, the joints are configured so the links move in parallel planes, and the assembly is called a planar four-bar linkage.
[1] Planar four-bar linkages are constructed from four links connected in a loop by four one-degree-of-freedom joints.
There are three basic types of planar four-bar linkage, depending on the use of revolute or prismatic joints: Planar four-bar linkages can be designed to guide a wide variety of movements, and are often the base mechanisms found in many machines.
Because of this, the kinematics and dynamics of planar four-bar linkages are also important topics in mechanical engineering.
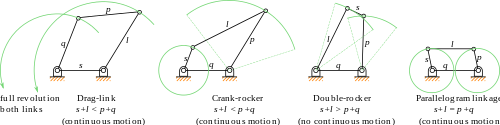
Assuming the frame is horizontal there are four possibilities for the input and output links:[2] Some authors do not distinguish between the types of rocker.
The movement of a quadrilateral linkage can be classified into eight cases based on the dimensions of its four links.
[4]The configuration of a quadrilateral linkage may be classified into three types: convex, concave, and crossing.
In order to minimize cost and maximize efficiency, a designer will choose the simplest mechanism possible to accomplish the desired motion.
When selecting a mechanism type to be designed, link lengths must be determined by a process called dimensional synthesis.
Dimensional synthesis involves an iterate-and-analyze methodology which in certain circumstances can be an inefficient process; however, in unique scenarios, exact and detailed procedures to design an accurate mechanism may not exist.
[6] Examples of symmetrical motion mechanisms include: Other applications require that the mechanism-to-be-designed has a faster average speed in one direction than the other.
To relate the geometry of a specific linkage to the timing of the stroke, an imbalance angle (β) is used.
They graphically display information showing where and when each mechanism is stationary or performing its forward and return strokes.
Timing charts allow designers to qualitatively describe the required kinematic behavior of a mechanism.
[8] Note that the cited conference paper incorrectly conflates Moore-Penrose pseudoinverses with one-sided inverses of matrices, falsely claiming that the latter are unique whenever they exist.