Hill's muscle model
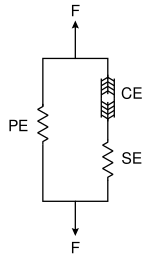
In biomechanics, Hill's muscle model refers to the 3-element model consisting of a contractile element (CE) in series with a lightly-damped elastic spring element (SE) and in parallel with lightly-damped elastic parallel element (PE).
Within this model, the estimated force-velocity relation for the CE element is usually modeled by what is commonly called Hill's equation, which was based on careful experiments involving tetanized muscle contraction where various muscle loads and associated velocities were measured.
They were derived by the famous physiologist Archibald Vivian Hill, who by 1938 when he introduced this model and equation had already won the Nobel Prize for Physiology.
There are many forms of the basic "Hill-based" or "Hill-type" models, with hundreds of publications having used this model structure for experimental and simulation studies.
Most major musculoskeletal simulation packages make use of this model.
This is a popular state equation applicable to skeletal muscle that has been stimulated to show Tetanic contraction.
It relates tension to velocity with regard to the internal thermodynamics.
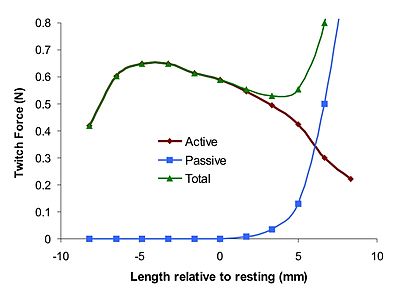
Hill's equation demonstrates that the relationship between F and v is hyperbolic.
Therefore, the higher the load applied to the muscle, the lower the contraction velocity.
Similarly, the higher the contraction velocity, the lower the tension in the muscle.
This hyperbolic form has been found to fit the empirical constant only during isotonic contractions near resting length.
[1] The muscle tension decreases as the shortening velocity increases.
The major appears to be the loss in tension as the cross bridges in the contractile element and then reform in a shortened condition.
The second cause appears to be the fluid viscosity in both the contractile element and the connective tissue.
Whichever the cause of loss of tension, it is a viscous friction and can therefore be modeled as a fluid damper .
The model is constituted by a contractile element (CE) and two non-linear spring elements, one in series (SE) and another in parallel (PE).
It is fully extensible when inactive but capable of shortening when activated.
The connective tissues (fascia, epimysium, perimysium and endomysium) that surround the contractile element influences the muscle's force-length curve.
The series element represents the tendon and the intrinsic elasticity of the myofilaments.
It also has a soft tissue response and provides energy storing mechanism.
of those elements satisfy During isometric contractions the series elastic component is under tension and therefore is stretched a finite amount.
[2] The forces in the parallel, series and contractile elements are defined by:
is the deformed muscle length due to motion of the contractile element, both from equation (3).
, is the peak isometric muscle force and the functions
It is defined based on the ordinary differential equation:
{\displaystyle {\frac {da(t)}{dt}}={\frac {1}{\tau _{rise}}}(1-a(t)u(t)+{\frac {1}{\tau _{fall}}}(a_{min}-a(t))(1-u(t))),\qquad (10)}
are time constants related to rise and decay for muscle activation and
is the neural excitation that leads to muscle contraction.
[4][5] Muscles present viscoelasticity, therefore a viscous damper may be included in the model, when the dynamics of the second-order critically damped twitch is regarded.
One common model for muscular viscosity is an exponential form damper, where is added to the model's global equation, whose