Ingenuity (helicopter)
Because radio signals take between five and 20 minutes to travel between Earth and Mars, depending on the planets' positions, it could not be controlled directly in real time but flew autonomously to execute flight plans designed and sent to it by JPL.
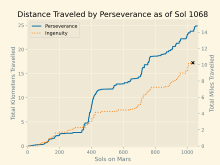
In this operational role, Ingenuity scouted areas of interest for the Perseverance rover, improved navigational techniques, and explored the limits of its flight envelope.
The development of the project that would eventually become Ingenuity started in 2012 when JPL director Charles Elachi visited the lab's Autonomous Systems Division, which had done relevant concept work.
Before it was built, launched and landed, scientists and managers expressed hope that helicopters could provide better mapping and guidance that would give future mission controllers more information to help with travel routes, planning, and hazard avoidance.
Scientists, engineers and managers proceeded from a pragmatic comparison of the benefits of additional aerial reconnaissance with the costs that inevitably fall on the schedule for the rover to complete all the tasks assigned to it.
[citation needed] At the end of the "test window", NASA extended support for Ingenuity for another 30 sols, limiting the frequency of departures to one flight every few weeks.
On the same date, in their report to the Planetary Advisory Committee (PAC), the helicopter was mentioned only in the past tense, e.g. "...placed Ingenuity and completed the technology demonstration phase...".
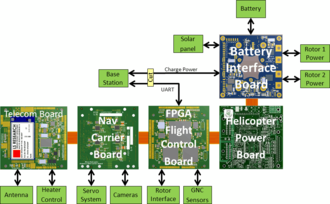
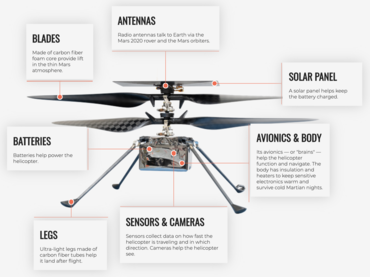
The Upper Sensor Assembly, with associated vibration isolation elements, is mounted on the mast close to the vehicle's center-of-mass to minimize the effects of angular rates and accelerations.
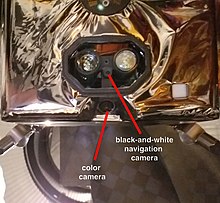
The Lower Sensor Assembly consists of an altimeter (Garmin LIDAR Lite v3), cameras, and a secondary IMU, all mounted directly on the Electronics Core Module (not on the mast).
[82] Perseverance dropped the debris shield protecting Ingenuity on 21 March 2021, and the helicopter deployed from the underside of the rover to the Martian surface on 3 April 2021.
[90][91][92][93][94] A high-speed spin test was attempted on 9 April, but failed due to the expiration of a watchdog timer, a software measure to protect the helicopter from incorrect operation in unforeseen conditions.
JPL managers said the photo procedure took an "enormous" amount of time, slowing the project's main mission of looking for signs of ancient life.
Ingenuity helped the mission team decide which route Perseverance should take to the top of the delta and aided it in analyzing potential science targets.
Software updates eliminated the helicopter's 50 foot (15 m) altitude limit, allowed it to change speed in flight, and improved its understanding of terrain texture below it.
When the shutdown began in mid-October 2021[98][106] the helicopter remained stationary 175 meters (575 feet) from Perseverance and communicated its status weekly to the rover for health checks.
When the battery pack's state of charge dropped below a lower limit, the helicopter's field-programmable gate array (FPGA) powered down, resetting the mission clock, which lost sync with the base station on the rover.
Controllers decided to turn off the helicopter's heaters at night to conserve power, accepting the risk of exposing components to nighttime's extreme cold.
Mission controllers developed a workaround using the craft's inertial measurement unit (IMU) to provide equivalent data to the onboard navigation computer.
[114] In January 2023, the helicopter began to have enough solar power to avoid overnight brownouts and FPGA resets due to the start of Martian spring.
[citation needed] In March 2023, the helicopter made frequent flights to deal with limited radio range in the rough terrain of the Jezero delta.
In the narrow canyons of the river delta, the helicopter needed to stay ahead of the rover, rather than entering a "keep out" zone and passing it, which JPL considered potentially hazardous.
Perseverance controllers, however, changed their exploration plans and drove further out of range, and then had difficulty collecting rock samples, adding another delay before finally driving toward the helicopter and re-establishing contact on 28 June.
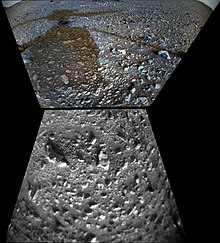
Communication was re-established on 20 January but during the subsequent post-flight assessment, images of Ingenuity's shadow, taken by its navigation and horizon cameras after the flight, showed damage to its rotor blade tips.
[123] Following a few final transmissions and a farewell message by the rotorcraft on 16 April 2024, the JPL team uploaded new software commands that direct the helicopter to continue collecting data well after its communications with the rover have ceased.
[132][133][134] Engineers from JPL and AeroVironment concluded that the inability of Ingenuity's navigation system to provide accurate data during the flight likely caused problems that ended the mission.
[139] The choice of Ingenuity as the prototype for the intended pair of assembler helicopters was based on the impressive safety margin built into it by AeroVironment designers.
Multiple small payloads can be carried by these types of helicopters, deployed and re-deployed to various locations, to perform a variety of distributed and networked operations.
The helicopter needs to show the ability to accurately follow the track it has already "mapped" on previously collected NAV frame sets and land at the takeoff point.
[143][17][10][144] Designing and proving how science payloads can be deployed, recovered, integrated, and operated on a dynamically and computationally representative rotorcraft will be critical in expanding a new frontier for Martian scientific exploration.
[143][17][10][144] The focus will include: Mars Aerial and Ground Global Intelligent Explorer (MAGGIE) is a compact fixed wing aircraft proposed during 2024 NIAC selections.



A – Rotor blade ; B – Pitch link; C – Servo ; D – Swashplate