Lorentz transformation
Historically, the transformations were the result of attempts by Lorentz and others to explain how the speed of light was observed to be independent of the reference frame, and to understand the symmetries of the laws of electromagnetism.
Many physicists—including Woldemar Voigt, George FitzGerald, Joseph Larmor, and Hendrik Lorentz[4] himself—had been discussing the physics implied by these equations since 1887.
Some months later, FitzGerald published the conjecture that bodies in motion are being contracted, in order to explain the baffling outcome of the 1887 aether-wind experiment of Michelson and Morley.
The interval between any two events, not necessarily separated by light signals, is in fact invariant, i.e., independent of the state of relative motion of observers in different inertial frames, as is shown using homogeneity and isotropy of space.
Finding the solution to the simpler problem is just a matter of look-up in the theory of classical groups that preserve bilinear forms of various signature.
[nb 2] First equation in (D3) can be written more compactly as: where (·, ·) refers to the bilinear form of signature (1, 3) on R4 exposed by the right hand side formula in (D3).
The full Lorentz group O(3, 1) also contains special transformations that are neither rotations nor boosts, but rather reflections in a plane through the origin.
Boosts should not be conflated with mere displacements in spacetime; in this case, the coordinate systems are simply shifted and there is no relative motion.
where ζ (lowercase zeta) is a parameter called rapidity (many other symbols are used, including θ, ϕ, φ, η, ψ, ξ).
Given the strong resemblance to rotations of spatial coordinates in 3d space in the Cartesian xy, yz, and zx planes, a Lorentz boost can be thought of as a hyperbolic rotation of spacetime coordinates in the xt, yt, and zt Cartesian-time planes of 4d Minkowski space.
The hyperbolic functions arise from the difference between the squares of the time and spatial coordinates in the spacetime interval, rather than a sum.
Comparing the Lorentz transformations in terms of the relative velocity and rapidity, or using the above formulae, the connections between β, γ, and ζ are
Three counterintuitive, but correct, predictions of the transformations are: The use of vectors allows positions and velocities to be expressed in arbitrary directions compactly.
The Lorentz factor γ retains its definition for a boost in any direction, since it depends only on the magnitude of the relative velocity.
For the inverse transformations, exchange r and r′ to switch observed coordinates, and negate the relative velocity v → −v (or simply the unit vector n → −n since the magnitude v is always positive) to obtain
The decomposition of Z (and Z′) into components perpendicular and parallel to v is exactly the same as for the position vector, as is the process of obtaining the inverse transformations (exchange (A, Z) and (A′, Z′) to switch observed quantities, and reverse the direction of relative motion by the substitution n ↦ −n).
Then the Lorentz transformations give the corresponding properties in a frame moving relative to the object with constant velocity.
It turns out L transforms with another vector quantity N = (E/c2)r − tp related to boosts, see relativistic angular momentum for details.
and this matrix equation contains the general conditions on the Lorentz transformation to ensure invariance of the spacetime interval.
carrying out the block matrix multiplications obtains general conditions on Γ, a, b, M to ensure relativistic invariance.
The rotation is about an axis in the direction of a unit vector e, through angle θ (positive anticlockwise, negative clockwise, according to the right-hand rule).
where the higher order terms not shown are negligible because ζ is small, and Bx is simply the boost matrix in the x direction.
[nb 7] The generators Jx, Jy, Jz, Kx, Ky, Kz form a basis set of V, and the components of the axis-angle and rapidity vectors, θx, θy, θz, ζx, ζy, ζz, are the coordinates of a Lorentz generator with respect to this basis.
where the bracket [A, B] = AB − BA is known as the commutator, and the other relations can be found by taking cyclic permutations of x, y, z components (i.e. change x to y, y to z, and z to x, repeat).
A group parameter is a component of a coordinate vector representing an arbitrary element of the Lie algebra with respect to some basis.
allows the transformation of other physical quantities that cannot be expressed as four-vectors; e.g., tensors or spinors of any order in 4d spacetime, to be defined.
where lower and upper indices label covariant and contravariant components respectively,[26] and the summation convention is applied.
Thus, in terms of matrices, this transformation should be thought of as the inverse transpose of Λ acting on the column vector Aμ.
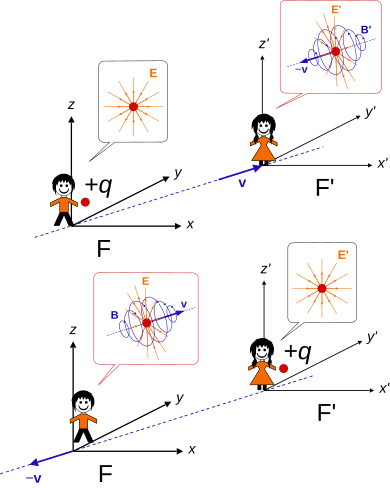
[29] The fact that the electromagnetic field shows relativistic effects becomes clear by carrying out a simple thought experiment.
[30] The electric and magnetic fields transform differently from space and time, but exactly the same way as relativistic angular momentum and the boost vector.

Top: frame F ′ moves at velocity v along the x -axis of frame F .
Bottom: frame F moves at velocity − v along the x ′ -axis of frame F ′ . [ 12 ]
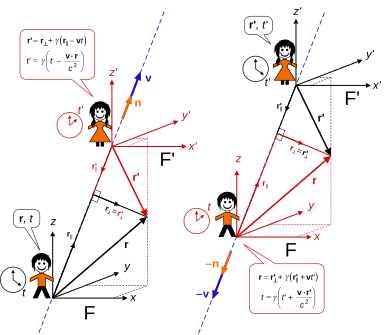
Left: Standard configuration. Right: Inverse configuration.