Lunar Roving Vehicle
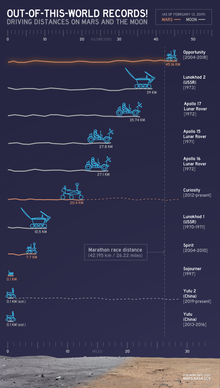
The Lunar Roving Vehicle (LRV) is a battery-powered four-wheeled rover used on the Moon in the last three missions of the American Apollo program (15, 16, and 17) during 1971 and 1972.
The concept of a lunar rover predated Apollo, with a 1952–1954 series in Collier's Weekly magazine by Wernher von Braun and others, "Man Will Conquer Space Soon!"
In 1959, Georg von Tiesenhausen conceived the lunar rover[2][3] as a four-wheel-drive vehicle with noninflated, flexible wheels.
[4] In the February 1964 issue of Popular Science, von Braun, then director of NASA's Marshall Space Flight Center (MSFC), discussed the need for a lunar surface vehicle, and revealed that studies had been underway at Marshall in conjunction with Lockheed, Bendix, Boeing, General Motors, Brown Engineering, Grumman, and Bell Aerospace.
Included was the need for a pressurized vehicle in the 6,490–8,470 lb (2,940–3,840 kg) weight range, accommodating two men with their expendables and instruments for traverses up to two weeks in duration.
In June 1964, Marshall awarded contracts to Bendix and Boeing, with GM's lab designated as the vehicle technology subcontractor.
[9] Even as the Bendix and Boeing studies were underway, Marshall was examining a less ambitious surface exploration activity, the LSSM.
With pressure from Congress to hold down Apollo costs, Saturn V production was reduced, allowing only a single launch per mission.
In November 1964, two-rocket models were put on indefinite hold, but Bendix and Boeing were given study contracts for small rovers.
From the beginnings at Marshall, the Brown Engineering Company of Huntsville, Alabama, had participated in all of the lunar mobility efforts.
With an urgent need to determine the feasibility of a two-man self-contained lander, von Braun bypassed the usual procurement process and had P&VE's Advanced Studies Office directly task Brown to design, build, and test a prototype vehicle.
The test vehicle was also operated in remote mode to determine characteristics that might be dangerous to the driver, such as acceleration, bounce-height, and turn-over tendency as it traveled at higher speeds and over simulated obstacles.
Following three months of proposal evaluation and negotiations, Boeing was selected as the Apollo LRV prime contractor on 28 October 1969.
Previous teams of astronauts were restricted to short walking distances around the landing site due to the bulky space suit equipment required to sustain life in the lunar environment.
The range, however, was operationally restricted to remain within walking distance of the lunar module, in case the rover broke down at any point.
The rear fender extension on the Apollo 16 LRV was lost during the mission's second extra-vehicular activity (EVA) at station 8 when John Young bumped into it while going to assist Charles Duke.
The fender extension on the Apollo 17 LRV broke when accidentally bumped by Eugene Cernan with a hammer handle.
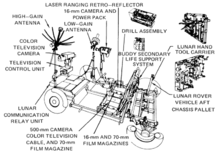
[23][24] The color TV camera mounted on the front of the LRV could be remotely operated by Mission Control in pan and tilt axes as well as zoom.
On each mission, at the conclusion of the astronauts' stay on the surface, the commander drove the LRV to a position away from the Lunar Module so that the camera could record the ascent stage launch.
The camera operator in Mission Control experienced difficulty in timing the various delays so that the LM ascent stage was in frame through the launch.
The frame is made of 2219 aluminum alloy tubing welded assemblies and consisted of a three-part chassis that was hinged in the center so it could be folded up and hung in the Lunar Module Quadrant 1 bay, which was kept open to space by omission of the outer skin panel.
Power was provided by two 36-volt silver-zinc potassium hydroxide non-rechargeable batteries developed by Eagle-Picher[29] with a charge capacity of 121 A·h each (a total of 242 A·h), yielding a range of 57 miles (92 km).
LRV batteries and electronics were passively cooled, using change-of-phase wax thermal capacitor packages and reflective, upward-facing radiating surfaces.
When stopped, the astronauts would open the blankets, and manually remove excess dust from the cooling surfaces with hand brushes.
The control and display modules were situated in front of the handle and gave information on the speed, heading, pitch, and power and temperature levels.
During operation, the commander (CDR) always drove, while the Lunar Module Pilot (LMP) was a passenger who assisted with navigation.
This constraint was relaxed during the longest traverse on Apollo 17, based on the demonstrated reliability of the LRV and spacesuits on previous missions.
[33] Astronaut deployment of the Lunar Roving Vehicle from the LM's open Quadrant 1 bay was achieved with a system of pulleys and braked reels using ropes and cloth tapes.
When they touched the ground, the front of the rover could be unfolded, the wheels deployed, and the entire frame let down to the surface by pulleys.
[43] A replica on loan from the Smithsonian Institution is on display at the Mission: Space attraction at Epcot at the Walt Disney World Resort near Orlando, Florida.