MIL-STD-1553
MIL-STD-1553 is a military standard published by the United States Department of Defense that defines the mechanical, electrical, and functional characteristics of a serial data bus.
It features multiple (commonly dual) redundant balanced line physical layers, a (differential) network interface, time-division multiplexing, half-duplex command/response protocol, and can handle up to 31 Remote Terminals (devices); 32 is typically designated for broadcast messages.
Other aircraft designs quickly followed, including the F/A-18 Hornet, AH-64 Apache, P-3C Orion, F-15 Eagle and F-20 Tigershark.
[8] The MIL-STD-1553 standard is maintained by both the U.S. Department of Defense and the Aerospace branch of the Society of Automotive Engineers.
Where a circular connector is used, its center pin is used for the high (positive) Manchester bi-phase signal.
This reduces the impact of a short circuit and ensures that the bus does not conduct current through the aircraft.
A Manchester code is used to present both clock and data on the same wire pair and to eliminate any DC component in the signal (which cannot pass the transformers).
The peak-to-peak output voltage of a transmitter is 18–27 V. The bus can be made dual or triply redundant by using several independent wire pairs, and then all devices are connected to all buses.
A different version of the bus uses optical fiber, which weighs less and has better resistance to electromagnetic interference, including EMP.
Whilst RTs cannot start a transfer directly on their own, the standard does include a method for when an RT needs to transmit data that is not automatically scheduled by the Bus Controller.
The format of this vector word is not defined in the standard, so the system designers must specify what values from what RTs mean what action the Bus Controller is to take.
RTs with higher-priority functions (for example, those operating the aircraft control surfaces) are polled more frequently.
However, the lack of explicit responses by the RTs receiving these broadcasts means that these transfers cannot be automatically re-tried in the event of an error in the transaction.
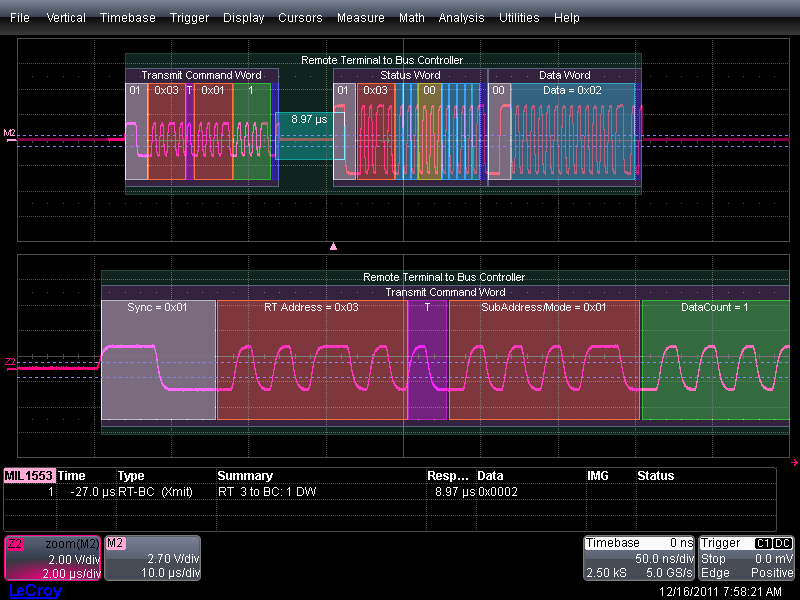
Four types of broadcast transactions are allowed between the BC and all capable RTs: The Command Word is built as follows.
This means that the Remote Terminal (RT) number 3 has responded to the Bus Controller query after 8.97 μs.
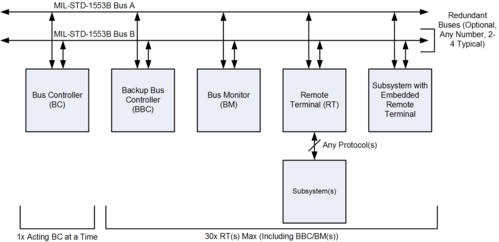
Figure 1 shows 1553 data bus details: The 1553B spec dictates that all devices in the system be connected to a redundant pair of buses to provide an alternate data path in the event of damage or failure of the primary bus.
Simpler examples of Remote Terminals might be interfaces that switch on the headlights, the landing lights, or the annunciators in an aircraft.
Thus, the end-to-end 100-foot bus (30 m) would have a 160 nanosecond propagation delay, which is equal to the average rise time of a 1553B signal.
With no stubs attached, the main bus looks like an infinite length transmission line with no disturbing reflections.
Therefore, a tradeoff between these conflicting requirements is necessary to achieve the specified signal-to-noise ratio and system error rate performance (for more information, refer to MIL-HDBK-1553A).
Transformer coupled stubs are preferred for their fault tolerance and better matching to the impedance of the bus, and consequent reduction in reflections, etc.
Direct coupled stubs provide no DC isolation or common mode rejection for the terminal external to its subsystem.
It can be expected that when the direct coupled stub length exceeds 1.6 feet (0.49 meters)], that it will begin to distort the main bus waveforms."
These stub connectors should not be terminated with matching resistors, but left open circuit when not used, with blanking caps where necessary.
The purpose of electrical termination is to minimize the effects of signal reflections that can cause waveform distortion.
STANAG 3910 (EFABus) mates a 1553 or 1773 link with additional high-speed 20 Mbps buses, either optical or electrical.
In the EFABus Express (EfEx) form, the high-speed link acts as its own control channel.
[14] In addition to 1553B, it also runs over coax, twisted pair, Power-Line Carrier, and existing ARINC 429 links.
It is similar to MIL-STD-1553 in the same notion of Bus Controller, Remote Terminal, monitor, same transmission speed, but the difference is that DIGIBUS uses separate links for data and commands.
The encoding, data rate, word structure, and control commands are fully identical.