Multidimensional discrete convolution
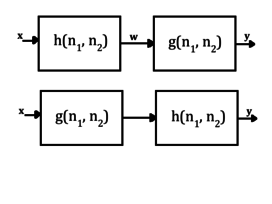
Further, that intermediate function is then convolved with the impulse response of the second filter, and thus the output can be represented by:
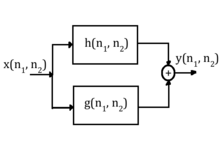
This means that in the case of a parallel system, the equivalent impulse response is provided by:
This is profound since several of the signals that are transferred in the digital world today are of multiple dimensions including images and videos.
Possible noise sources include errors in channel transmission, the analog to digital converter, and the image sensor.
Usually noise caused by the channel or sensor creates spatially-independent, high-frequency signal components that translates to arbitrary light and dark spots on the actual image.
In order to rid the image data of the high-frequency spectral content, it can be multiplied by the frequency response of a low-pass filter, which based on the convolution theorem, is equivalent to convolving the signal in the time/spatial domain by the impulse response of the low-pass filter.
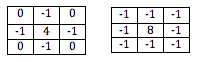
[2] In addition to filtering out spectral content, the multidimensional convolution can implement edge detection and smoothing.
This once again is wholly dependent on the values of the impulse response that is used to convolve with the input image.
In addition to image processing, multidimensional convolution can be implemented to enable a variety of other applications.
Since filters are widespread in digital communication systems, any system that must transmit multidimensional data is assisted by filtering techniques It is used in real-time video processing, neural network analysis, digital geophysical data analysis, and much more.
[3] One typical distortion that occurs during image and video capture or transmission applications is blur that is caused by a low-pass filtering process.
This approach can be further optimized by taking into account how memory is accessed within a computer processor.
Consider the optimized case where a row of signal data can fit entirely within the processor's cache.
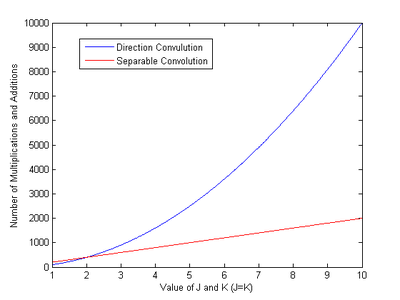
If the result is calculated using the direct convolution approach without exploiting the separability of the filter, this will require approximately
This method helps reduce the computational complexity often associated with multidimensional convolutions due to the vast amounts of data inherent in modern-day digital systems.
[9] For sake of brevity, the two-dimensional case is used as an example, but the same concepts can be extended to multiple dimensions.
Using an FFT instead, the frequency response of the filter and the Fourier transform of the input would have to be stored in memory.
[10] Massive amounts of computations and excessive use of memory storage space pose a problematic issue as more dimensions are added.
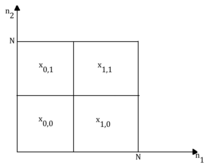
has a square region support of length N in both vertical and horizontal directions as shown in the figure below.
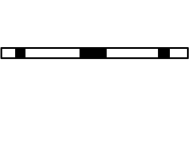
In the figure below, the first graph on the left represents the convolution corresponding to the component of the input
directions, which leads to overlap (highlighted in blue) since the length of each individual convolution is equivalent to:
, is converted back to matrix form, which produces the output of the two-dimensional discrete convolution.
The entire one-dimensional strip could have been convolved with; however, it is less computationally expensive to simply ignore the leading zeroes.
[15] Helix transformations to implement recursive filters via convolution are used in various areas of signal processing.
[15] In addition, it can be applied to assist with the problem of implicit three-dimensional wavefield extrapolation.
[16] Other applications include helpful algorithms in seismic data regularization, prediction error filters, and noise attenuation in geophysical digital systems.
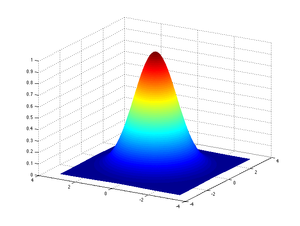
Gaussian convolution can be effectively approximated via implementation of a Finite impulse response (FIR) filter.
Another method for approximating Gaussian convolution is via recursive passes through a box filter.
Typically, recursive passes 3, 4, or 5 times are performed in order to obtain an accurate approximation.
That is, M-dimensional Gaussian convolution could be approximated via recursive passes through the following one-dimensional filters: