Parallelogram of force
The parallelogram of forces is a method for solving (or visualizing) the results of applying two forces to an object.
When more than two forces are involved, the geometry is no longer a parallelogram, but the same principles apply to a polygon of forces.
The resultant force due to the application of a number of forces can be found geometrically by drawing arrows for each force.
The parallelogram of forces is a graphical manifestation of the addition of vectors.
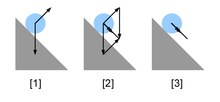
Suppose a particle moves at a uniform rate along a line from A to B (Figure 2) in a given time (say, one second), while in the same time, the line AB moves uniformly from its position at AB to a position at DC, remaining parallel to its original orientation throughout.
Accounting for both motions, the particle traces the line AC.
Because a displacement in a given time is a measure of velocity, the length of AB is a measure of the particle's velocity along AB, the length of AD is a measure of the line's velocity along AD, and the length of AC is a measure of the particle's velocity along AC.
The particle's motion is the same as if it had moved with a single velocity along AC.
[1] Suppose two forces act on a particle at the origin (the "tails" of the vectors) of Figure 1.
Let the lengths of the vectors F1 and F2 represent the velocities the two forces could produce in the particle by acting for a given time, and let the direction of each represent the direction in which they act.
Each force acts independently and will produce its particular velocity whether the other force acts or not.
At the end of the given time, the particle has both velocities.
By the above proof, they are equivalent to a single velocity, Fnet.
By Newton's second law, this vector is also a measure of the force which would produce that velocity, thus the two forces are equivalent to a single force.
[2] We model forces as Euclidean vectors or members of
Our final assumption is that the resultant of two forces doesn't change when rotated.
is any rotation (any orthogonal map for the usual vector space structure of
Consider two perpendicular forces
Under the invariance of the rotation, we get
Similarly, consider two more forces
However, when combining our two sets of auxiliary forces we used the associativity of
Using this additional assumption, we will form an additional proof below.
[3] [4] We model forces as Euclidean vectors or members of
We assume commutativity, as these are forces being applied concurrently, so the order shouldn't matter
is associative, then this map will be linear.
must be equivalent to the normal vector addition operator.
[3][5] The mathematical proof of the parallelogram of force is not generally accepted to be mathematically valid.
Various proofs were developed (chiefly Duchayla's and Poisson's), and these also caused objections.
That the parallelogram of force was true was not questioned, but why it was true.
Today the parallelogram of force is accepted as an empirical fact, non-reducible to Newton's first principles.