Distortion (optics)
In geometric optics, distortion is a deviation from rectilinear projection; a projection in which straight lines in a scene remain straight in an image.
It is a form of optical aberration that may be distinguished from other aberrations such as spherical aberration, coma, chromatic aberration, field curvature, and astigmatism in a sense that these impact the image sharpness without changing an object shape or structure in the image (e.g., a straight line in an object is still a straight line in the image although the image sharpness may be degraded by the mentioned aberrations) while distortion can change the object structure in the image (so named as distortion).
Although distortion can be irregular or follow many patterns, the most commonly encountered distortions are radially symmetric, or approximately so, arising from the symmetry of a photographic lens.
[1] Mathematically, barrel and pincushion distortion are quadratic, meaning they increase as the square of distance from the center.
Other distortions are in principle possible – pincushion in center and barrel at the edge, or higher order distortions (degree 6, degree 8) – but do not generally occur in practical lenses, and higher order distortions are small relative to the main barrel and pincushion effects.
The names for these distortions come from familiar objects which are visually similar.
In photography, distortion is particularly associated with zoom lenses, particularly large-range zooms, but may also be found in prime lenses, and depends on focal distance – for example, the Canon EF 50mm f/1.4 exhibits barrel distortion at extremely short focal distances.
Mustache distortion is observed particularly on the wide end of zooms, with certain retrofocus lenses, and more recently on large-range zooms such as the Nikon 18–200 mm.
A certain amount of pincushion distortion is often found with visual optical instruments, e.g., binoculars, where it serves to counteract the globe effect.
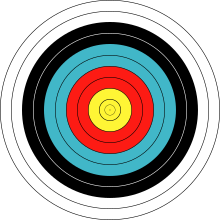
In order to understand these distortions, it should be remembered that these are radial defects; the optical systems in question have rotational symmetry (omitting non-radial defects), so the didactically correct test image would be a set of concentric circles having even separation – like a shooter's target.
It will then be observed that these common distortions actually imply a nonlinear radius mapping from the object to the image: What is seemingly pincushion distortion, is actually simply an exaggerated radius mapping for large radii in comparison with small radii.
A graph showing radius transformations (from object to image) will be steeper in the upper (rightmost) end.
A graph showing radius transformations (from object to image) will be less steep in the upper (rightmost) end.
Radial distortion that depends on wavelength is called "lateral chromatic aberration" – "lateral" because radial, "chromatic" because dependent on color (wavelength).
This can cause colored fringes in high-contrast areas in the outer parts of the image.
Radial distortion, whilst primarily dominated by low-order radial components,[3] can be corrected using Brown's distortion model,[4] also known as the Brown–Conrady model based on earlier work by Conrady.
Moustache distortion will have a non-monotonic radial geometric series where for some
For radial distortion, this division model is often preferred over the Brown–Conrady model, as it requires fewer terms to more accurately describe severe distortion.
This involves determining which distorted pixel corresponds to each undistorted pixel, which is non-trivial due to the non-linearity of the distortion equation.
[3] Lateral chromatic aberration (purple/green fringing) can be significantly reduced by applying such warping for red, green and blue separately.
Distorting or undistorting requires either both sets of coefficients or inverting the non-linear problem which, in general, lacks an analytical solution.
Standard approaches such as approximating, locally linearizing and iterative solvers all apply.
Which solver is preferable depends on the accuracy required and the computational resources available.
where Calibrated software works from a table of lens/camera transfer functions: Manual software allows manual adjustment of distortion parameters: Besides these systems that address images, there are some that also adjust distortion parameters for videos: Radial distortion is a failure of a lens to be rectilinear: a failure to image lines into lines.
If a photograph is not taken straight-on then, even with a perfect rectilinear lens, rectangles will appear as trapezoids: lines are imaged as lines, but the angles between them are not preserved (tilt is not a conformal map).
Due to perspective, cameras image a cube as a square frustum (a truncated pyramid, with trapezoidal sides) – the far end is smaller than the near end.
This creates perspective, and the rate at which this scaling happens (how quickly more distant objects shrink) creates a sense of a scene being deep or shallow.
This cannot be changed or corrected by a simple transform of the resulting image, because it requires 3D information, namely the depth of objects in the scene.
Note that if the center of the image is closer than the edges (for example, a straight-on shot of a face), then barrel distortion and wide-angle distortion (taking the shot from close) both increase the size of the center, while pincushion distortion and telephoto distortion (taking the shot from far) both decrease the size of the center.
Fisheye lenses are wide-angle lenses with heavy barrel distortion and thus exhibit both these phenomena, so objects in the center of the image (if shot from a short distance) are particularly enlarged: even if the barrel distortion is corrected, the resulting image is still from a wide-angle lens, and will still have a wide-angle perspective.