Rover (space exploration)
Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots.
Rovers are typically created to land on another planet (other than Earth) via a lander-style spacecraft,tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids.
These rovers are thus capable of operating autonomously with little assistance from ground control as far as navigation and data acquisition are concerned, although they still require human input for identifying promising targets in the distance to which to drive, and determining how to position itself to maximize solar energy.
[1] Giving a rover some rudimentary visual identification capabilities to make simple distinctions can allow engineers to speed up the reconnaissance.
For example, Stanford University researchers have proposed "Hedgehog", a small cube-shaped rover that can controllably hop—or even spin out of a sandy sinkhole by corkscrewing upward to escape—for surface exploration of low gravity celestial bodies.
[3] The Soviet rover was intended to be the first roving remote-controlled robot on the Moon, but crashed during a failed start of the launcher 19 February 1969.
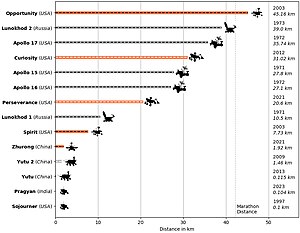
Lunokhod 2 operated for about four months, covered 39 km (24 mi) of terrain, including hilly upland areas and rilles, and sent back 86 panoramic images and over 80,000 TV pictures.
[8][9][10] Based on wheel rotations Lunokhod 2 was thought to have covered 37 km (23 mi) but Russian scientists at the Moscow State University of Geodesy and Cartography (MIIGAiK) have revised that to an estimated distance of about 42.1–42.2 km (26.2–26.2 mi) based on Lunar Reconnaissance Orbiter (LRO) images of the lunar surface.
[27] Takara Tomy, JAXA and Doshisha University made a rover to be launched onboard Ispace's lander called Hakuto-R.
The 26 kg 6 wheeled rover Pragyan has descend from lander belly, on to the Moon's surface, using one of its side panels as a ramp.
Two small metal rods were used for autonomous obstacle avoidance, as radio signals from Earth would have taken too long to drive the rovers using remote control.
The rover was planned to be placed on the surface after landing by a manipulator arm and to move in the field of view of the television cameras and stop to make measurements every 1.5 meters.
[41] Beagle 2 was designed to explore Mars with a small "mole" (Planetary Undersurface Tool, or PLUTO), to be deployed by the arm.
PLUTO had a compressed spring mechanism designed to enable it to move across the surface at a rate of 20 mm per second and to burrow into the ground, collecting a subsurface sample in a cavity in its tip.
Launched from Earth on July 7, 2003, it landed on the Martian Meridiani Planum on January 25, 2004, at 05:05 Ground UTC (about 13:15 local time), three weeks after its twin Spirit (MER-A) touched down on the other side of the planet.
Zhurong was expected to reactivate in December 2022, but due to excessive dust accumulation on the solar panel, the rover could not wake itself.
[51] In February 2020, Chinese astronomers reported, for the first time, a high-resolution image of a lunar ejecta sequence, and, as well, direct analysis of its internal architecture.
These were based on observations made by the Lunar Penetrating Radar (LPR) on board the Yutu-2 rover while studying the far side of the Moon.
[52][53] The Hakuto-R Mission 2 includes a 5 kg (11 lb) rover called "TENACIOUS", designed and manufactured in Luxembourg which will explore the area around the landing site, after being lowered to the lunar surface from the lander.
[54] The European Space Agency (ESA) has designed and carried out early prototyping and testing of the Rosalind Franklin rover.
As a result of Russia's invasion of Ukraine, ESA severed ties with Roscosmos and was left without a launch vehicle for this mission.