Schiaparelli EDM
Telemetry signals from Schiaparelli, monitored in real time by the Giant Metrewave Radio Telescope in India (and confirmed by Mars Express), were lost about one minute from the surface during the final landing stages.
[9] The telemetry data accumulated and relayed by ESA's ExoMars Trace Gas Orbiter and Mars Express were used to investigate the failure modes of the landing technology employed.
[19] Schiaparelli forms an important "block" of learning how to land heavy payloads on Mars, which is vital to future crewed missions.
[28] A deep space manoeuvre was executed by the TGO main engine in two legs on 28 July and on 11 August in order to target the entry flight path angle and the landing site.
[30] On the same day, the Schiaparelli module arrived at Mars traveling at 21,000 km/h (13,000 mph; 5.8 km/s) and engaged in its prime task of entry, descent, and landing.
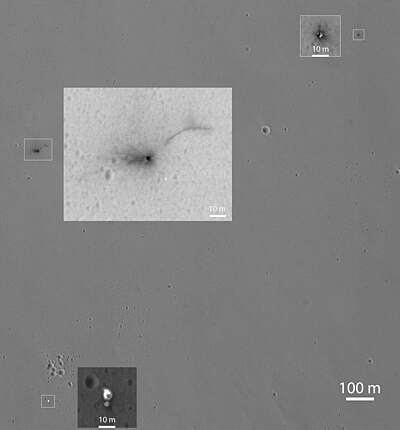
[29] The hard touch-down location, reconstructed using data from the Mars Reconnaissance Orbiter, was identified quite close to the expected landing site, about 6.4 km short-range from it.
[36] The landing site chosen was Meridiani Planum, a Martian plain prized by Mars landers for its flat terrain and low elevation that gives a spacecraft time and distance to slow down before reaching the ground.
[40] It was also thought that the EDM would have a chance of arriving when Mars experienced its global dust storms, and thus gain knowledge about the atmosphere under these less common conditions.
[42] Global dust storms hit in the summer of 2018, cutting off light to the solar powered Opportunity rover which was still operating nearby to the Schiaparelli landing site.
When the lander disconnected from the orbiter, it switched to internal battery power and used a low-power hibernation mode while it coasted for three days just before entering the Martian atmosphere.
[47] After slowing its initial entry through the atmosphere, the module deployed a parachute and was to complete its landing on retrorockets by using a closed-loop guidance, navigation and control system based on a Doppler radar altimeter sensor, and on-board inertial measurement units.
[3][48] On final landing it was designed to endure rocks about 31 cm (12 in) high, and it was hoped, but not guaranteed, that no out-sized boulders or craters would be encountered.
[61] A day after the attempted landing, the Context Camera of NASA's MRO identified new ground markings due to the lander's impact and parachute.
[72] An investigation that concluded in May 2017 identified four "root causes for the mishap [...]: Insufficient uncertainty and configuration management in the modelling of the parachute dynamics which led to expect much lower dynamics than observed in flight; Inadequate persistence time of the IMU [Inertial Measurement Unit] saturation flag and inadequate handling of IMU saturation by the GNC [Guidance Navigation and Control]; Insufficient approach to Failure Detection, Isolation and Recovery and design robustness; Mishap in management of subcontractors and acceptance of hardware.
This superfast rotation briefly saturated Schiaparelli's spin-measuring instrument, which resulted in a large attitude-estimation error by the guidance, navigation and control-system software.
[74] The inquiry also determined that "[t]he mission would not have been jeopardised by the attitude knowledge error induced by IMU [Inertial Measurement Unit] saturation, if the persistence time would have been set at a lower value.
[61] The primary mission goal was to test the landing systems, including the parachute, Doppler radar altimeter, hydrazine thrusters, etc.
[41] The surface science payload was called DREAMS, and was designed to obtain meteorological data for a few days after landing,[80] as well as make the first measurements of atmospheric electricity on Mars.
[80][87] The institutions that contributed to the DREAMS science payload include INAF and CISAS from Italy, LATMOS from France, ESTEC from the Netherlands, FMI from Finland, and INTA from Spain.
In addition, the MetHumi sensor was intended to complement MicroARES measurements with critical data about humidity, to enable scientists to better understand the dust electrification process.
[86] The two favored possible explanations are reactions with hydrogen peroxide or ozone created by ultraviolet light or atmospheric electrical processes during dust storms.
[2] The main goals for DECA included:[2] Because the Schiarapelli demonstrator lander transmitted during its descent, a great deal of telemetry was successfully returned.
[96] At one point, Roscosmos offered to contribute a 100 watt radioisotope thermoelectric generator (RTG) power source for the EDM lander to allow it to monitor the local surface environment for a full Martian year,[100][101] but because of complex Russian export control procedures, it later opted for the use of a non-rechargeable electric battery with enough power for 2 to 8 sols.
[106] So even though the radio array at Pune listened in "real time", the entire EDL sequence, which would take about 6 minutes, had already occurred even as it was being recorded as starting to enter the atmosphere.
[111] When the lander disconnects from the orbiter, it spends most of its time in a low-power hibernation mode while it coasts through space before entering the Martian atmosphere.
[113] Schiaparelli module has 3 sets of three thrusters, nine total, that operate starting at about 1 km (half a mile) up in pulse mode, slowing the spacecraft from 70 to 4 m/s (252 to 14 km/h).
[114] Data from a timer, doppler radar, and inertial measurement unit are merged in the lander's computers to control the operation of the thrusters.
[116] One concern was the Schiaparelli crash, as this landing system is being used for the ExoMars 2020 mission consisting of the Rosalind Franklin rover delivered by the instrumented 2020 Kazachok lander.
[116] The ExoMars team has been praised for "putting a brave face" on what happened and being positive about the EDM's very credible return on its prime mission: data about entry, descent, and landing, despite the crash.
[117] Another positive was the development of the demonstrator module as part of the overall grand plan for ExoMars, which meant that the landing technologies underwent a real-world test before carrying more valuable cargo.














 Clickable image:
Clicking on the labels will open a new article.
Clickable image:
Clicking on the labels will open a new article.


