Second fundamental form
Together with the first fundamental form, it serves to define extrinsic invariants of the surface, its principal curvatures.
More generally, such a quadratic form is defined for a smooth immersed submanifold in a Riemannian manifold.
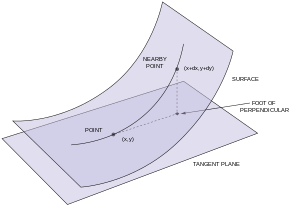
Regularity of the parametrization means that ru and rv are linearly independent for any (u,v) in the domain of r, and hence span the tangent plane to S at each point.
Equivalently, the cross product ru × rv is a nonzero vector normal to the surface.
The parametrization thus defines a field of unit normal vectors n: The second fundamental form is usually written as its matrix in the basis {ru, rv} of the tangent plane is The coefficients L, M, N at a given point in the parametric uv-plane are given by the projections of the second partial derivatives of r at that point onto the normal line to S and can be computed with the aid of the dot product as follows: For a signed distance field of Hessian H, the second fundamental form coefficients can be computed as follows: The second fundamental form of a general parametric surface S is defined as follows.
Regularity of the parametrization means that r1 and r2 are linearly independent for any (u1,u2) in the domain of r, and hence span the tangent plane to S at each point.
The parametrization thus defines a field of unit normal vectors n: The second fundamental form is usually written as The equation above uses the Einstein summation convention.
regarded as a vector-valued differential form, and the brackets denote the metric tensor of Euclidean space.
More generally, on a Riemannian manifold, the second fundamental form is an equivalent way to describe the shape operator (denoted by S) of a hypersurface, where ∇vw denotes the covariant derivative of the ambient manifold and n a field of normal vectors on the hypersurface.
In that case it is a quadratic form on the tangent space with values in the normal bundle and it can be defined by where