State-space representation
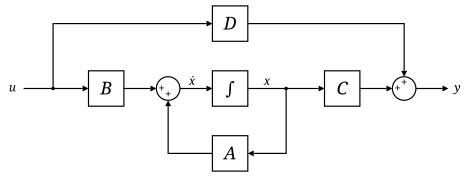
In control engineering and system identification, a state-space representation is a mathematical model of a physical system specified as a set of input, output, and variables related by first-order differential equations or difference equations.
If the dynamical system is linear, time-invariant, and finite-dimensional, then the differential and algebraic equations may be written in matrix form.
[1][2] The state-space method is characterized by the algebraization of general system theory, which makes it possible to use Kronecker vector-matrix structures.
The capacity of these structures can be efficiently applied to research systems with or without modulation.
[3] The state-space representation (also known as the "time-domain approach") provides a convenient and compact way to model and analyze systems with multiple inputs and outputs.
Unlike the frequency domain approach, the use of the state-space representation is not limited to systems with linear components and zero initial conditions.
The state-space model can be applied in subjects such as economics,[4] statistics,[5] computer science and electrical engineering,[6] and neuroscience.
[7] In econometrics, for example, state-space models can be used to decompose a time series into trend and cycle, compose individual indicators into a composite index,[8] identify turning points of the business cycle, and estimate GDP using latent and unobserved time series.
If the system is represented in transfer function form, the minimum number of state variables is equal to the order of the transfer function's denominator after it has been reduced to a proper fraction.
It is important to understand that converting a state-space realization to a transfer function form may lose some internal information about the system, and may provide a description of a system which is stable, when the state-space realization is unstable at certain points.
Hybrid systems allow for time domains that have both continuous and discrete parts.
Depending on the assumptions made, the state-space model representation can assume the following forms: Stability and natural response characteristics of a continuous-time LTI system (i.e., linear with matrices that are constant with respect to time) can be studied from the eigenvalues of the matrix
The stability of a time-invariant state-space model can be determined by looking at the system's transfer function in factored form.
The denominator of the transfer function is equal to the characteristic polynomial found by taking the determinant of
This may be the case if unstable poles are canceled out by zeros (i.e., if those singularities in the transfer function are removable).
Observability is a measure for how well internal states of a system can be inferred by knowledge of its external outputs.
The "transfer function" of a continuous time-invariant linear state-space model can be derived in the following way: First, taking the Laplace transform of
and a single-input single-output (SISO) system, the transfer function is defined as the ratio of output and input
Therefore, assuming zero initial conditions, the transfer function matrix is derived from
Due to the simplicity of this matrix notation, the state-space representation is commonly used for multiple-input, multiple-output systems.
The Rosenbrock system matrix provides a bridge between the state-space representation and its transfer function.
The transfer function coefficients can also be used to construct another type of canonical form
This state-space realization is called observable canonical form because the resulting model is guaranteed to be observable (i.e., because the output exits from a chain of integrators, every state has an effect on the output).
The strictly proper transfer function can then be transformed into a canonical state-space realization using techniques shown above.
A common method for feedback is to multiply the output by a matrix K and setting this as the input to the system:
Another fairly common situation is when all states are outputs, i.e. y = x, which yields C = I, the identity matrix.
One fairly common simplification to this system is removing D, which reduces the equations to
A classical linear system is that of one-dimensional movement of an object (e.g., a cart).
Newton's laws of motion for an object moving horizontally on a plane and attached to a wall with a spring:
is a linear combination of states and inputs then the equations can be written in matrix notation like above.