True-range multilateration
Similarly, two spherical ranges can be used to locate a point on a sphere, which is a fundamental concept of the ancient discipline of celestial navigation — termed the altitude intercept problem.
In three-dimensional geometry, when it is known that a point lies on the surfaces of three spheres, then the centers of the three spheres along with their radii also provide sufficient information to narrow the possible locations down to no more than two (unless the centers lie on a straight line).
Pseudo range multilateration is almost always implemented by measuring times-of-arrival (TOAs) of energy waves.
For similar ranges and measurement errors, a navigation and surveillance system based on true-range multilateration provide service to a significantly larger 2-D area or 3-D volume than systems based on pseudo-range multilateration.
The Australian Aerodist aerial survey system utilized 2-D Cartesian true-range multilateration.
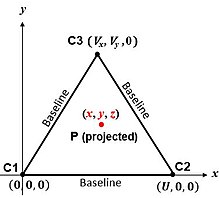
[7] This 2-D scenario is sufficiently important that the term trilateration is often applied to all applications involving a known baseline and two range measurements.
The correct and ambiguous solutions are perpendicular to and equally distant from (on opposite sides of) the baseline.
Thus, large areas or distances can be surveyed based on multiple, smaller triangles—termed a traverse.
There are multiple algorithms that solve the 3-D Cartesian true-range multilateration problem directly (i.e., in closed-form) – e.g., Fang.
[12] Integrating range measurement from three or more radars (e.g., FAA's ERAM) is a 3-D aircraft surveillance application.
3-D true-range multilateration has been used on an experimental basis with GPS satellites for aircraft navigation.
[13] 3-D true-range multilateration was evaluated by the International Civil Aviation Organization as an aircraft landing system, but another technique was found to be more efficient.
[14] Accurately measuring the altitude of aircraft during approach and landing requires many ground stations along the flight path.
It's the spherical geometry equivalent of the trilateration method of surveying (although the distances involved are generally much larger).
A solution at sea (not necessarily involving the Sun and Moon) was made possible by the marine chronometer (introduced in 1761) and the discovery of the 'line of position' (LOP) in 1837.
As the earth is better modeled as an ellipsoid of revolution than a sphere, iterative techniques may be used in modern implementations.
[2] This enabled the coverage area of a Loran-C station triad to be extended significantly (e.g., doubled or tripled) and the minimum number of available transmitters to be reduced from three to two.
[6] When there are more range measurements available than there are problem dimensions, either from the same C1 and C2 (or C1, C2 and C3) stations, or from additional stations, at least these benefits accrue: The iterative Gauss–Newton algorithm for solving non-linear least squares (NLLS) problems is generally preferred when there are more 'good' measurements than the minimum necessary.
In 3-D Cartesian space, a fourth sphere eliminates the ambiguous solution that occurs with three ranges, provided its center is not co-planar with the first three.
In 2-D Cartesian or spherical space, a third circle eliminates the ambiguous solution that occurs with two ranges, provided its center is not co-linear with the first two.
1, the characteristic of 'one-time' situations is that point P and at least one of C1 and C2 change from one application of the true-range multilateration technique to the next.
However, in other situations, the true-range multilateration technique is applied repetitively (essentially continuously).
1 -- depends upon two factors: (1) the range measurement accuracy, and (2) the geometric relationship of P to the system's stations C1 and C2.
Accordingly, some applications place restrictions on the location of point P. For a 2-D Cartesian (trilateration) situation, these restrictions take one of two equivalent forms: Planning a true-range multilateration navigation or surveillance system often involves a dilution of precision (DOP) analysis to inform decisions on the number and location of the stations and the system's service area (two dimensions) or service volume (three dimensions).
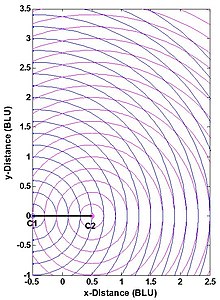
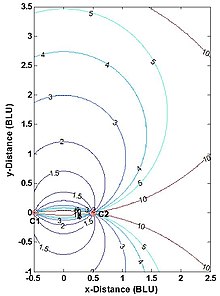
5 shows horizontal DOPs (HDOPs) for a 2-D, two-station true-range multilateration system.
A user of such a system should be roughly broadside of the baseline and within an application-dependent range band.
For example, for DME/DME navigation fixes by aircraft, the maximum HDOP permitted by the U.S. FAA is twice the minimum possible value, or 2.828,[23] which limits the maximum usage range (which occurs along the baseline bisector) to 1.866 times the baseline length.
Navigation and surveillance systems typically involve vehicles and require that a government entity or other organization deploy multiple stations that employ a form of radio technology (i.e., utilize electromagnetic waves).
The advantages and disadvantages of employing true-range multilateration for such a system are shown in the following table.
Complexity and cost of user equipage is likely the most important factor in limiting use of true-range multilateration for vehicle navigation and surveillance.