Inverted pendulum
It can be suspended stably in this inverted position by using a control system to monitor the angle of the pole and move the pivot point horizontally back under the center of mass when it starts to fall over, keeping it balanced.
[1] Most applications limit the pendulum to 1 degree of freedom by affixing the pole to an axis of rotation.
Whereas a normal pendulum is stable when hanging downward, an inverted pendulum is inherently unstable, and must be actively balanced in order to remain upright; this can be done either by applying a torque at the pivot point, by moving the pivot point horizontally as part of a feedback system, changing the rate of rotation of a mass mounted on the pendulum on an axis parallel to the pivot axis and thereby generating a net torque on the pendulum, or by oscillating the pivot point vertically.
A simple demonstration of moving the pivot point in a feedback system is achieved by balancing an upturned broomstick on the end of one's finger.
A second type of inverted pendulum is a tiltmeter for tall structures, which consists of a wire anchored to the bottom of the foundation and attached to a float in a pool of oil at the top of the structure that has devices for measuring movement of the neutral position of the float away from its original position.
Variations on this problem include multiple links, allowing the motion of the cart to be commanded while maintaining the pendulum, and balancing the cart-pendulum system on a see-saw.
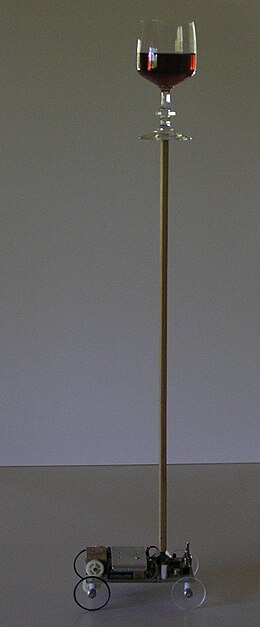
[2] The understanding of a similar problem can be shown by simple robotics in the form of a balancing cart.
Another way that an inverted pendulum may be stabilized, without any feedback or control mechanism, is by oscillating the pivot rapidly up and down.
If the oscillation is sufficiently strong (in terms of its acceleration and amplitude) then the inverted pendulum can recover from perturbations in a strikingly counterintuitive manner.
The resulting equation: The moment of inertia for a point mass: In the case of the inverted pendulum the radius is the length of the rod,
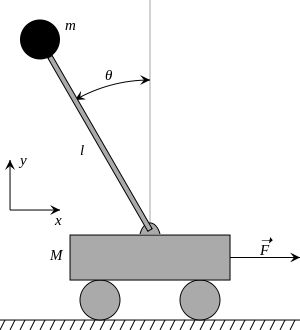
is divided from each side resulting in: An inverted pendulum on a cart consists of a mass
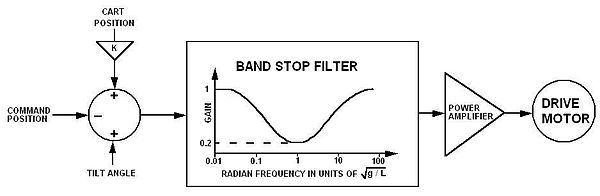
To prevent uncontrolled swinging, the frequency spectrum of the pivot motion should be suppressed near
As a consequence of the null angle modulation strategy, the position feedback is positive, that is, a sudden command to move right produces an initial cart motion to the left followed by a move right to rebalance the pendulum.
The equations of motion of the cart are shown below where the LHS is the sum of the forces on the body and the RHS is the acceleration.
In order to complete the equations of motion, the acceleration of the point mass attached to the pendulum must be computed.
with both sides yields the following on the LHS (note that a transpose is the same as a dot product) In the above equation the relationship between body frame components of the reaction forces and inertial frame components of reaction forces is used.
Combining the LHS with the RHS and dividing through by m yields which again is identical to the result of Lagrange's method.
For a derivation of the equations of motions from Newton's second law, as above, using the Symbolic Math Toolbox[4] and references therein.
Achieving stability of an inverted pendulum has become a common engineering challenge for researchers.
The two wheeled platform has the ability to spin on the spot offering a great deal of maneuverability.
is a slow oscillation, the pendulum quickly falls over when disturbed from the upright position.
The deviation from the vertical position stays small, and the pendulum doesn't fall over.
A person standing upright acts as an inverted pendulum with their feet as the pivot, and without constant small muscular adjustments would fall over.
The human nervous system contains an unconscious feedback control system, the sense of balance or righting reflex, that uses proprioceptive input from the eyes, muscles and joints, and orientation input from the vestibular system consisting of the three semicircular canals in the inner ear, and two otolith organs, to make continual small adjustments to the skeletal muscles to keep us standing upright.
Walking, running, or balancing on one leg puts additional demands on this system.
Certain diseases and alcohol or drug intoxication can interfere with this reflex, causing dizziness and disequilibration, an inability to stand upright.
Some simple examples include balancing brooms or meter sticks by hand.
[7] The inverted pendulum was a central component in the design of several early seismometers due to its inherent instability resulting in a measurable response to any disturbance.
[8] The inverted pendulum model has been used in some recent personal transporters, such as the two-wheeled self-balancing scooters and single-wheeled electric unicycles.
These devices are kinematically unstable and use an electronic feedback servo system to keep them upright.