Vector notation
For denoting a vector, the common typographic convention is lower case, upright boldface type, as in v. The International Organization for Standardization (ISO) recommends either bold italic serif, as in v, or non-bold italic serif accented by a right arrow, as in
[3] In advanced mathematics, vectors are often represented in a simple italic type, like any variable.
[citation needed] Vector representations include Cartesian, polar, cylindrical, and spherical coordinates.
In 1835 Giusto Bellavitis introduced the idea of equipollent directed line segments
In 1878, W. K. Clifford severed the two products to make the quaternion operation useful for students in his textbook Elements of Dynamic.
[5] In 1891, Oliver Heaviside argued for Clarendon to distinguish vectors from scalars.
[6] In 1912, J.B. Shaw contributed his "Comparative Notation for Vector Expressions" to the Bulletin of the Quaternion Society.
[7] Subsequently, Alexander Macfarlane described 15 criteria for clear expression with vectors in the same publication.
When Felix Klein was organizing the German mathematical encyclopedia, he assigned Arnold Sommerfeld to standardize vector notation.
[9] In 1950, when Academic Press published G. Kuerti’s translation of the second edition of volume 2 of Lectures on Theoretical Physics by Sommerfeld, vector notation was the subject of a footnote: "In the original German text, vectors and their components are printed in the same Gothic types.
The more usual way of making a typographical distinction between the two has been adopted for this translation.
"[10] Felix Klein commented on differences in notation of vectors and their operations in 1925 through a Mr. Seyfarth who prepared a supplement to Elementary Mathematics from an Advanced Standpoint — Geometry after "repeated conferences" with him.
The disciples of Grassmann, in other ways so orthodox, replaced in part the appropriate expressions of the master by others.
The existing terminologies were merged or modified, and the symbols which indicate the separate operations have been used with the greatest arbitrariness.
On these accounts even for the expert, a great lack of clearness has crept into this field, which is mathematically so simple.
[11]: 53 Efforts to unify the various notational terms through committees of the International Congress of Mathematicians were described as follows: The Committee which was set up in Rome for the unification of vector notation did not have the slightest success, as was to have been expected.
It published in 1921 a proposed notation for vector quantities, which aroused at once and from many sides the most violent opposition.
where vz below is zero) can be specified as the sum of the scalar multiples of the components of the vector with the members of the standard basis in
The angle, typically represented as θ (the Greek letter theta), is the angle, usually measured counterclockwise, between a fixed direction, typically that of the positive x-axis, and the direction from the origin to the point.
Vectors can also be specified using simplified autonomous equations that define r and θ explicitly.
This can be unwieldy, but is useful for avoiding the confusion with two-dimensional rectangular vectors that arises from using ordered pair or matrix notation.
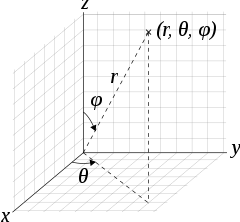
The first distance, usually represented as r or ρ (the Greek letter rho), is the magnitude of the projection of the vector onto the xy-plane.
The angle, usually represented as θ or φ (the Greek letter phi), is measured as the offset from the line collinear with the x-axis in the positive direction; the angle is typically reduced to lie within the range
A three-dimensional cylindrical vector v can be represented as any of the following, using either ordered triplet or matrix notation: Where r is the magnitude of the projection of v onto the xy-plane, θ is the angle between the positive x-axis and v, and h is the height from the xy-plane to the endpoint of v. Again, the angle symbol (
A cylindrical vector can also be specified directly, using simplified autonomous equations that define r (or ρ), θ (or φ), and h (or z).
The azimuth angle, usually represented as θ, is the (counterclockwise) offset from the positive x-axis.
The zenith angle, usually represented as φ, is the offset from the positive z-axis.
Both angles are typically reduced to lie within the range from zero (inclusive) to 2π (exclusive).
); the prefix should be used consistently to produce the distance-angle-angle combination that distinguishes spherical vectors from cylindrical ones.
In some older literature, the dot product is implied between two vectors written side-by-side.