Three-dimensional space
The term may also refer colloquially to a subset of space, a three-dimensional region (or 3D domain),[1] a solid figure.
Technically, a tuple of n numbers can be understood as the Cartesian coordinates of a location in a n-dimensional Euclidean space.
and can be identified to the pair formed by a n-dimensional Euclidean space and a Cartesian coordinate system.
Books XI to XIII of Euclid's Elements dealt with three-dimensional geometry.
Book XI develops notions of orthogonality and parallelism of lines and planes, and defines solids including parallelpipeds, pyramids, prisms, spheres, octahedra, icosahedra and dodecahedra.
Book XIII describes the construction of the five regular Platonic solids in a sphere.
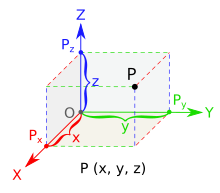
In the 17th century, three-dimensional space was described with Cartesian coordinates, with the advent of analytic geometry developed by René Descartes in his work La Géométrie and Pierre de Fermat in the manuscript Ad locos planos et solidos isagoge (Introduction to Plane and Solid Loci), which was unpublished during Fermat's lifetime.
In fact, it was Hamilton who coined the terms scalar and vector, and they were first defined within his geometric framework for quaternions.
While not explicitly studied by Hamilton, this indirectly introduced notions of basis, here given by the quaternion elements
It was not until Josiah Willard Gibbs that these two products were identified in their own right, and the modern notation for the dot and cross product were introduced in his classroom teaching notes, found also in the 1901 textbook Vector Analysis written by Edwin Bidwell Wilson based on Gibbs' lectures.
Also during the 19th century came developments in the abstract formalism of vector spaces, with the work of Hermann Grassmann and Giuseppe Peano, the latter of whom first gave the modern definition of vector spaces as an algebraic structure.
On the other hand, four distinct points can either be collinear, coplanar, or determine the entire space.
In the last case, the three lines of intersection of each pair of planes are mutually parallel.
Another type of sphere arises from a 4-ball, whose three-dimensional surface is the 3-sphere: points equidistant to the origin of the euclidean space R4.
In precise topological terms, each point of the 3-sphere has a neighborhood which is homeomorphic to an open subset of 3-D space.
In three dimensions, there are nine regular polytopes: the five convex Platonic solids and the four nonconvex Kepler-Poinsot polyhedra.
However, if the generatrix and axis are parallel, then the surface of revolution is a circular cylinder.
In analogy with the conic sections, the set of points whose Cartesian coordinates satisfy the general equation of the second degree, namely,
[6] There are six types of non-degenerate quadric surfaces: The degenerate quadric surfaces are the empty set, a single point, a single line, a single plane, a pair of planes or a quadratic cylinder (a surface consisting of a non-degenerate conic section in a plane π and all the lines of R3 through that conic that are normal to π).
Both the hyperboloid of one sheet and the hyperbolic paraboloid are ruled surfaces, meaning that they can be made up from a family of straight lines.
Another way of viewing three-dimensional space is found in linear algebra, where the idea of independence is crucial.
can be viewed as the abstract vector space, together with the additional structure of a choice of basis.
[11] Physically, it is conceptually desirable to use the abstract formalism in order to assume as little structure as possible if it is not given by the parameters of a particular problem.
For example, in a problem with rotational symmetry, working with the more concrete description of three-dimensional space
Stated another way, a preferred choice of axes breaks the rotational symmetry of physical space.
, is equal to the scalar-valued function: In index notation, with Einstein summation convention this is
and is usually written as: The fundamental theorem of line integrals, says that a line integral through a gradient field can be evaluated by evaluating the original scalar field at the endpoints of the curve.
Then Stokes' theorem relates the surface integral of the curl of a vector field F over a surface Σ in Euclidean three-space to the line integral of the vector field over its boundary ∂Σ: Suppose V is a subset of
(in the case of n = 3, V represents a volume in 3D space) which is compact and has a piecewise smooth boundary S (also indicated with ∂V = S).
If F is a continuously differentiable vector field defined on a neighborhood of V, then the divergence theorem says:[15] The left side is a volume integral over the volume V, the right side is the surface integral over the boundary of the volume V. The closed manifold ∂V is quite generally the boundary of V oriented by outward-pointing normals, and n is the outward pointing unit normal field of the boundary ∂V.