Orientation (geometry)
In geometry, the orientation, attitude, bearing, direction, or angular position of an object – such as a line, plane or rigid body – is part of the description of how it is placed in the space it occupies.
More specialist uses include Miller indices in crystallography, strike and dip in geology and grade on maps and signs.
Typically, the orientation is given relative to a frame of reference, usually specified by a Cartesian coordinate system.
In general the position and orientation in space of a rigid body are defined as the position and orientation, relative to the main reference frame, of another reference frame, which is fixed relative to the body, and hence translates and rotates with it (the body's local reference frame, or local coordinate system).
Further details about the mathematical methods to represent the orientation of rigid bodies and planes in three dimensions are given in the following sections.
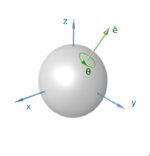
In two dimensions the orientation of any object (line, vector, or plane figure) is given by a single value: the angle through which it has rotated.
When there are d dimensions, specification of an orientation of an object that does not have any rotational symmetry requires d(d − 1) / 2 independent values.
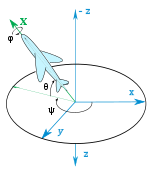
Several methods to describe orientations of a rigid body in three dimensions have been developed.
Therefore, the composition of the former three angles has to be equal to only one rotation, whose axis was complicated to calculate until matrices were developed.
[3][4] Another is based upon roll, pitch and yaw,[5] although these terms also refer to incremental deviations from the nominal attitude