Bistatic sonar
There are 3 different mechanisms causing transmission Loss: spherical (or cylindrical in shallow water) spreading, absorbing and scattering by ocean media inhomogeneities.
This sound level is very high, and it is impossible to detect the echo during the ping duration τ.
If the sonar is close to the surface, bottom or both, (which may happen in shallow water), the dead zone may be greater than Cτ/2 due to a high level of reverberation.
In monostatic sonar the receiver is listening to the echo which is reflected (scattered) right back from the target.
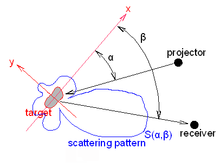
Bistatic sonar can work in two ways: by utilizing either the target backscattering or forward scattering.
For coastal surveillance, a large receive array of hydrophones is usually deployed close to the shore and connected with cables to a land-based processing center.
To enable long range target detection (far away from the shore), one can use a powerful mobile projector, deployable from the ship.
A system of this kind exploits the idea of “bringing the projector closer to area of interest and getting the transmission loss down”.
On the other hand, the lower the frequency, the larger the size of directional projector and receive array.
The example is SITAR project,[5] developed to find objects like toxic waste containers and mines.